气动系统因其具有价格低廉、结构简单、以空气为介质、不污染环境等特点,使气动调节阀成为工业过程控制中一种重要的执行部件,但由于空气介质的压缩性大、精度小,如何获得高精度的位置控制是当前气动技术的一大难点;其次,在石油、化工、生物医药等工业控制中,对防火防爆的要求非常严格,因此如何实现调节阀控制安全也是目前的研究热点;另外过程控制不仅仅只局限于定位控制,而且还需要对流量、压力等过程量进行控制,目前这类高精度、安全、低功耗控制器主要来自进口,如德国的Burkert、美国ABB等。基于这种背景,本文设计了一种基于4~20mA电流控制信号的低功耗二线制智能阀门控制器。
一、系统工作原理
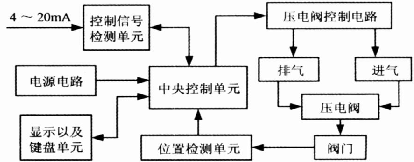
图1 控制系统结构示意图
如图1所示,阀门控制器控制电路主要由中央控制单元、控制信号检测单元、位置检测单元、显示以及键盘单元、压电阀控制电路、电源电路等部分组成。阀门控制器接收来自调节器的设定阀门开度的电流信号(4~20mA),用这个信号与从调节阀阀杆反馈回来的实际开度信号进行比较,如果微处理器得到一个偏差信号,就利用这个信号去控制压电阀,使一定量的压缩空气经过压电阀进入到调节阀的执行机构的气室,推动阀芯的移动或转动,从而达到阀芯的准确定位,最终实现过程控制系统中过程量(压力或流量等)的准确控制。
二、过程控制器硬件设计
1、二线制简介
所谓二线制是指在仪表中电源和信号线公用2根导线,不使用任何额外的电源,供电完全是从控制信号中取出,目前工业现场最常用的就是符合工业标准的4~20mA电流信号。在石油、化工等工业控制中,对防火防爆的要求非常严格,而二线制仪表由于电源本身即取自信号线,不需要另外提供电源,所以在构成本质安全的防爆结构时具有很大的优势。
2、主控单片机选取
对于二线制控制器来说,输入电流信号范围为4~20mA,此信号既作为控制信号,又提供控制器所需要的全部功率,因此该控制器要求在4mA电流下也能正常工作,这就要求该控制器设计时需要充分考虑各器件的功率消耗。控制器所用的微处理器选取的是超低功耗的MSP430F135单片机,局部电路和功能软件设计采用中断唤醒超低功耗工作方式,该单片机包含12位A/D转换器、硬件乘法器、定时器、看门狗、串行通信模块、I/O端口等丰富的片上资源,可实现在线编程。
3、电源电路
如前所述,控制器采取二线制结构,控制电压取自4~20mA电流环路,同时该信号还是控制信号,因此必须把4~20mA电流信号转换成电压信号,具体电源电路如图2所示。
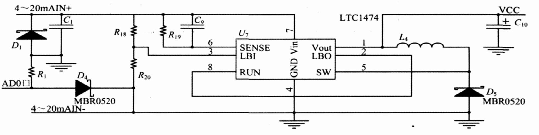
图2 电源电路图
4、控制信号检测单元
信号放大电路如图3所示,R1为采样电阻,其一端接地,另一端电压与电流成正比,该电压经低功耗运放MAX4044放大后输入到单片机A/D口。
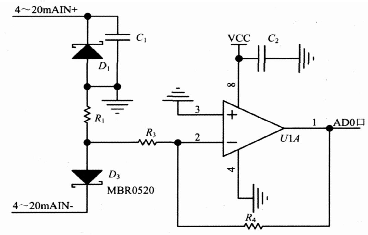
图3 信号放大电路图
5、位置检测单元
由于反馈电位器易磨损、寿命短,所以位置检测单元选用导电塑料电子尺,其功能是把一个机械位移信号转换成电气信号,并且该信号与机械运动成正比,单片机对电子尺输出电信号进行A/D转换,从而实现阀位检测。
6、压电阀控制部分
控制系统采用德国HOERBIGER-ORIGA公司先进的压电阀和气动放大器作为气压驱动装置,压电阀片的响应时间小于2ms,压电气动放大器响应时间小于20ms,由此可见,阀门可以达到很高的调节精度和较快的响应时间,阀门一旦定位完成,其耗气量可以忽略不计。压电阀工作电压是24V,因此必须把3.3V电压信号升压至24V,这里选择低功耗升压芯片MAX629,MAX629是美国MAXIN公司生产的,其组成的升压DC-DC转换器输入电压很低,输出电压可达±28V,仅有80μA的静态电流,特别适合为低功耗、高电压设备供电,升压电路如图4所示。
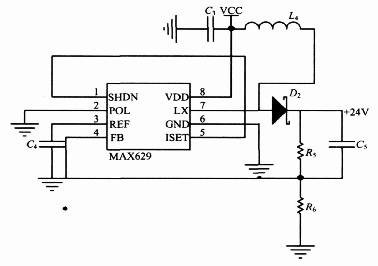
图4 升压电路图
7、信号输出电路
按照工控要求,仪表或设备通常需要输出4~20mA标准信号,该阀门控制器4~20mA电流信号输出使用的是美国ADI公司推出的单片高性能数/模转换器AD421,它由电流环路供电,16位数字信号SPI串行输入,4~20mA电流输出。电流输出信号可用来表示阀门的开度或者回路中压力、流量等过程值的大小,输出什么信号由单片机根据需要,把采集到的不同信号值通过SPI总线送至AD421进行数模转换,具体4~20mA电流信号输出电路如图5所示。
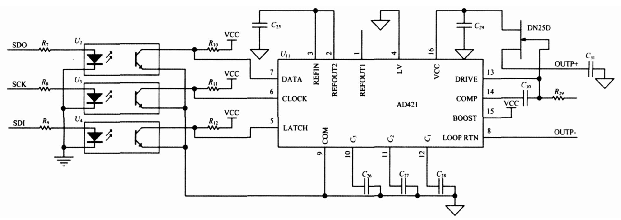
图5 4~20mA电流信号输出电路图
显示单元采用超低功耗的NJU6433芯片并定制成专用字符液晶显示模块,可以设置菜单和各种控制参数,按键部分不在此详述。
三、过程控制器控制软件设计
1、过程控制系统结构图
液压回路中,压力或者流量会随着阀门开度的改变而改变,对压力或者流量的精确控制,实际上可以转换为定位控制,因此过程控制回路可以表示成双闭环控制系统,过程控制系统结构如图6所示,过程量(压力或者流量等)控制回路的输出作为定位控制回路的输入,内环为定位器控制回路,外环为过程量控制回路,定位控制回路控制的好坏直接影响到整个控制回路中压力、流量等的精确控制。

图6 过程控制系统结构
2、定位控制软件设计
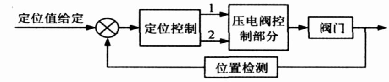
图7 定位控制结构图
让控制器工作在定位模式,定位控制结构如图7所示,压电阀驱动由控制信号1,2决定,两者都为高电平时,则压电阀工作在进气状态;当两者都为低电平时,则压电阀工作在排气状态;当控制信号1为低电平,控制信号2为高电平时,则压电阀状态保持不变。压电阀具有很高的调节精度和较快的响应时间的功能,能在20ms内完成状态改变。用单片机两IO口输出控制信号,取控制信号周期为20ms,在定位器控制算法中,文献[2]提出了采用积分分离的PID算法。试验表明,该压电阀在20ms内可以完成一次进气,但完成一次排气至少需要100ms,因此相同的进气和排气时间对行程的作用效果是不一样的。如果在偏差范围内采取PID控制,定位点处控制效果实际并不理想。反复试验表明,采取分段、不对称进排气控制的算法较理想,每次执行算法前,需要对给定值和实际值进行预处理,即标度转换,目的是使控制器能适用于不同行程的阀门,位置标度公式如下:
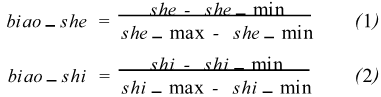
位置给定值为4~20mA,转变成相应电压并由单片机A/D转换,两极限A/D值分别是she_min,she_max,每次采样给定值she按式(1)标度转换成biao_she,同样位置反馈值也由单片机A/D口读取。由于电子尺实际可检测行程大于阀门的行程,因此控制器会通过完全进气和排气记录阀门2个极限位置时的A/D转换值,分别是shi_min,shi_max,每次采样实际值shi按式(2)标度转换成biao_shi,定位器控制流程如图8所示。
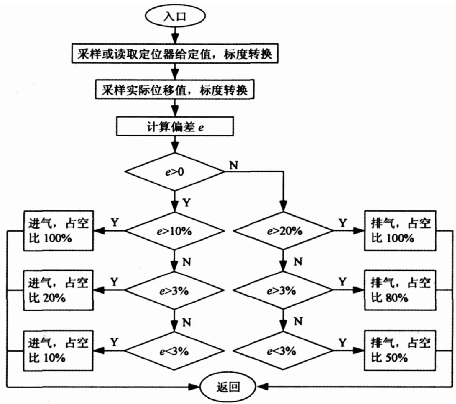
图8 定位器控制流程图
经反复试验,定位器都能在2s以内快速到达设定值,并且没有超调。
3、过程控制软件设计
如3.2节所述,由于定位器都能在2s内到达给定值,因此每2s采集压力或流量传感器的值,过程控制回路调节周期取2s,控制方法采用增量式PI算法,具体公式可参考文献。PI调节的输出值作为定位器的给定值,定时器中断程序流程图如图9所示,过程控制子程序流程图如图10所示。
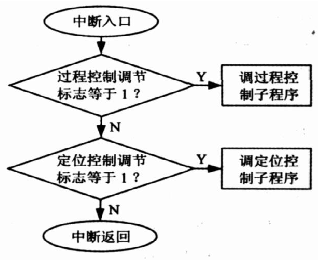
图9 定时器中断程序流程图
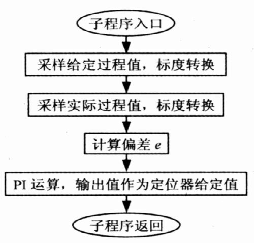
图10 过程控制子程序流程图
四、试验结果
按上述控制方法进行压力控制试验和流量控制试验,试验中采集压力或者流量值,送至PC端,绘制的流量控制曲线图和压力控制曲线图分别如图11、图12所示。图11中直线表示给定流量值,曲线表示实际流量值,从图中可以看出,当给定流量值发生10%的突变后,大约经过50s就使控制实际流量到达给定值,并且稳态误差很小,能控制在1%以内。图12中直线表示给定压力值,曲线表示实际压力值,从图中可以看出,当给定压力值发生40%的突变后,大约经过30s就可以使实际压力到达给定值,并且稳态误差很小。通过对试验数据分析表明,稳态误差能控制在1%以内,说明这种控制方法是有效可行的。
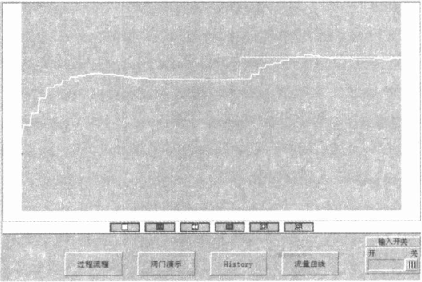
图11 流量控制曲线图
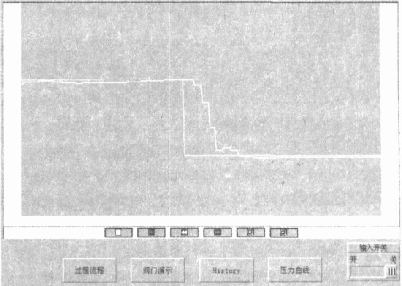
图12 压力控制曲线图
五、结论
阀门控制器从4~20mA电流环取电,功耗低、精度高,能很好地满足防火防爆的特殊要求,目前该控制器已应用在生物制药过程控制系统中,对其流量或压力实现了准确控制,并且性能优越,控制可靠。






