我们所说的
调节阀气缸
活塞执行机构(以下简称为气缸活塞
执行机构)是一种高性能的转臂式调节阀执行机构,具有结构紧凑、体积小、效率高等诸多优点,故该机构与角行程类调节阀(如碟阀、
球阀等)和类似用途机构配套使用,广泛应用于电力、石油、化工、冶金、造船等行业。然而由于该机构中存在过多的过约束,导致该机构装配困难、零部件严重的磨损以及较严重的弹性振动与噪音,使得该机构的工作效率大大降低。在某些工作环境恶劣的情况下甚至还造成该执行机构无法正常工作。
过约束广泛存在于机械系统中,特别是应用最广泛的平面闭链机械中,由于不可避免的制造、安装误差特别是运动副元素的形位误差的存在,造成了对理想约束的干扰或破坏,从而导致对机械系统工作性能的一系列有害影响。研究表明,无或少过约束的机械对误差相对不是很敏感,即能自动消除系统内部由于误差所造成的过约束障碍,自动适应外部工作条件和环境的随机变化,且具有高效、节能、低噪声、易于装拆及成本低(可降低某些精度要求)等诸多优点。也就是说,这样的结构能根据机构中的误差(主要是运动副元素的形位误差)进行自动调整达到静定,使机械系统能无障碍地顺畅工作,我们把这样的结构称之为自调结构。
针对上述气缸活塞执行机构存在的问题,在对该机构进行过约束分析的基础上,下面进行该机构的自调结构设计,并利用ADAMS软件对原机构及其自调机构建立虚拟样机模型,从机构输出力矩、机构中各运动副的受力、运动副形位误差对机构性能的影响等方面进行分析和比较。
一、气缸活塞执行机构输出力矩的分析计算
图1为气缸活塞执行机构的结构简图(图中只包括机构的上半部分,其下半部分与上半部分呈对称分布)。
该机构的设计过程中,力和输出力矩是关键的两个设计参数,故本文首先对这两个参数进行分析和计算。
在机构的实际运动过程中,各部件之间的摩擦是无法避免的,故此处适当考虑了摩擦的影响。
视活塞和圆柱销为一体,活塞与气缸之间接触而产生的压力用来表示;活塞与气缸之间的摩擦力为F
h,设曲柄与圆柱销之间的摩擦力为F
p,圆柱销对曲柄的作用力为F′,输出力为F,驱动力为F
d,且F
d=pS。式中,p为供气压力(kg/cm
2);s为活塞有效面积(cm
2)。
由力平衡关系得:
其中,θ为曲柄转角;θ
0为曲柄初始位置转角;ψ
0为曲柄槽偏角;F
p=F・μ,F
h=F
p・μ(为计算、推导方便,现将各构件之间的摩擦系数均视为μ)
且:
x=90°-(θ+θ
0)+ψ
0=90°-((θ+θ
0)-ψ
0)解方程组(1)得:
设F
g为输出轴对气缸的压力;F
s为输出轴与箱体之间的摩擦力,且F
g=F=F′因为F
s=F
gμ,得F
s=F
p′=Fμ
由力矩平衡关系
式中,e为活塞移动导路到曲柄中心距离(mm);η为整个气缸活塞执行机构的运转效率;R
p为圆柱销的半径(mm);R
s为输出轴的半径(mm)。
利用VB(VisualBasic)编程计算可得出某种型号的气缸活塞执行机构的输出力矩(M
out)曲线如图3所示。
由该机构的输出力矩数据及其曲线变化规律可以看出:该机构的输出力矩符合旋转类调节阀所需的“浴盆曲线”状,启动瞬间输出力矩较大,启动后逐渐减小,达到最小输出力矩之后又逐渐增大,其最大输出力矩出现在曲柄转角θ=0°,最小值出现在曲柄转角θ=50°。
二、气缸活塞执行机构的过约束分析及自调结构设计
1、气缸活塞执行机构的过约束分析
机构中存在的过约束对所提出的精度要求以及机构中存在的误差是敏感的,在误差存在的条件下,将会出现约束不确定,该过约束将可能成为实约束,而与所要求的约束相矛盾,成为“障碍”,故准确确定机构中过约束的数量和类型是合理设计的前提。
如图4所示:A、B、B、C、C五处运动副均为V级副,圆柱销和曲柄在D处构成平面高副,现计算该机构中存在的过约束:
①重复运动副结构中的过约束
从机构结构学和运动学角度考虑,在两个构件之间只能有一个运动副(可动联接),但是,在许多情况下,特别是当传递的力很大时,为了改善构件的受力状况、增加机构的刚度和工作可靠性,在两构件之间常常采用重复的运动副结构。这种结构的主要结构性能可由其过约束数q来表明,q越大,其制造精度要求越高,对变形等越敏感,装配和拆卸也越困难。重复运动副
(2结构中的过约束数q可用下式来计算:

式中,q为重复运动副结构中的过约束;s
i为第i个运动副引入的约束数;s为重复运动副结构所需引入的约束数;k为重复运动副结构中的运动副数。
气缸活塞执行机构中的转动副B和B
p构成重复运动副,此处提供的过约束数q=5+5-5=5;C和C
p处也构成重复运动副,也提供相同的过约束。
②自由度回路法分析过约束
根据回路自由度分析法,下面对气缸活塞执行机构回路中存在的过约束类型加以分析:
由表1可以看出:该机构具有两个自由度,一个是机构的基本自由度,另一个是局部自由度,该机构由于缺少绕x轴转动的自由度(θ
x=0),说明该机构存在绕x轴转动的过约束(qθ
x=1)。
由以上对过约束的计算和分析可以看到:该机构不仅存在由重复运动副而引入的过约束,而且机构回路中还存在绕轴转动的过约束。由于该机构为上下对称的两部分,因此可得该机构存在的总的过约束数为:q=5+1+5+5+1=17。
2、气缸活塞执行机构自调结构设计
为使过约束机构能够无障碍的顺畅可靠的工作,要求运动副有较小的形位误差,因此在设计时,对这些形位误差要有严格的限制。由于设计精度的提高,增加了制造难度和制造成本,增大了装配拆卸的难度,不利于自动快捷的装配,降低了装配效率。过约束障碍和超静定性质,导致构件及运动副元素在运动转动过程中的强制变形,使运动副中的作用力急剧增大,磨损加快、机械效率、工作可靠性与精度、使用寿命等显著降低,对工作环境和外载荷的适应能力降低
(4)。因此,我们应尽可能的减少或消除机构中的过约束,以降低由于运动副形位误差带来的上述不利影响,降低机构对各种误差因素的敏感度。为了减少该机构中的过约束数,可以采用降低运动副级别的方法,也就是增加运动副中自由度的方法。
由于原气缸活塞执行机构中两圆柱销与活塞间的联结副(运动副B和B
p)和输出轴与箱体间的联结副(运动副C和C
p)均为Ⅴ级转动副,构成了重复运动副,而导致机构中存在过多的过约束,使得机构对此处运动副的形位误差较敏感,所以这里采用降低运动副级数的方法,即将运动副B和B
p由原来的Ⅴ-Ⅴ级运动副(图5a)转换为Ⅲ-Ⅱ级运动副(图5b),以消除此处重复运动副带来的过约束。因曲柄通过输出轴与气缸体相联结,考虑到输出轴的平面运动特及运动的平稳性,所以运动副C和C
p仍为Ⅴ级转动副。
经过自调结构设计后,气缸活塞执行机构中存在的过约束降为5,即只剩下重复运动副C(或运动副C
p)中的过约束。
三、气缸活塞执行机构的仿真分析
为验证自调后气缸活塞执行机构(以下简称为自调机构)的性能,利用ADAMS
(6)软件(AutomaticDynamicAnalysis
ofMechanicalSystems)对原机构和自调机构进行分析比较。
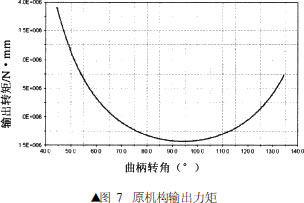
在ADAMS中建立气缸活塞执行机构的模型如图6所示:

通过仿真分析,得到原机构输出力矩随曲柄转角变化规律如图7所示,其变化规律与理论分析变化规律相吻合:
以下为在相同输入的条件下,利用ADAMS对原机构和自调机构从输出力矩、运动副受力、运动副形位误差对机构的性能影响三方面的分析比较。
 1、输出力矩分析
1、输出力矩分析
如图8所示,对原机构和自调机构输出力矩的比较分析可知:原机构输出力矩的最大值为:3822.83Nm,平均值为2404.15Nm;自调机构输出力矩的最大值为3889.9Nm,平均值为2467.7Nm。因此自调之后,机构的输出力矩略有增加。
 2、各运动副受力分析
2、各运动副受力分析
(1)运动副A的受力比较
如图9所示,由运动副A的受力变化可知:原机构中运动副A所受到的最大力为259.16N;平均值为92.54N;自调机构中运动副A所受到的最大力为90.94N,平均值为79.56N;
(2) 运动副B的受力
如图10所示,由运动副B的受力变化可知,原机构中运动副B所受到的最大力为216.27N,平均值为18.15N;自调机构中运动副B所受到的最大力为11.45N,平均值为5.51N。
(3) 运动副C的受力
如图11所示,由运动副C的受力变化可知:原机构中运动副C所受到的最大力为272.97N,平均值为43.76N;自调机构中运动副C所受到的最大力为59.01N,平均值为43.83N。
通过以上对各运动副受力的比较可知:自调机构与原机构相比,运动副A、运动副B和运动副C的受力明显降低,而且各运动副受力变化也比较均匀,避免了圆柱销在机构启动瞬间和换向瞬间受到的瞬间冲击载荷,减缓其在工作过程中受到的交变载荷的作用,从而有效的减小了该执行机构的弹性振动及运动副的磨损。
3、运动副形位误差对机构性能的影响分析
由上述分析可知气缸活塞执行机构中圆柱销和活塞间的支承为重复运动副,重复运动副将使机构出现过约束。由于过约束的存在,使得机构对此处支承在X方向的精度要求非常严格,即对运动副B和运动副B的同轴度精度要求较高,同时对在Y、Z方向上的位置精度也有一定的要求。下面分析当运动副存在角度误差时对机构性能的影响。
(1) 原机构的分析
运动副B分别存在X、Y、Z方向的角度误差时与运动副B不存在角度误差时,运动副B、运动副B’受力和输出力的偏差如下图:
由图12、图13和图14的分析结果可以看出:运动副B存在X方向和Y方向的角度误差时,对运动副B和运动副B’的受力以及输出力较原机构中运动副B和运动副B’的受力以及输出力均会产生较大的偏差。
除此之外,还可以发现,原机构中,当运动副B存在X和Y方向的形位误差时,由于运动副B和运动副B’受力不再是一组大小相等的平行力,而产生转矩,从而使得圆柱销受到一定的扭矩。同理可以分析出运动副A、运动副C存在角度误差时,对各运动受力以及输出力产生的影响,此处从略。
(2) 自调机构的分析运动副B分别存在X、Y、Z方向的角度误差时与运动副B不存在角度误差时,运动副B、运动副B’受力和输出力的偏差:由图15、图16和图17的分析结果可以看出:运动副B存在X、Y、Z方向的角度误差时,对运动副B和运动副B’的受力以及输出力均不会产生影响。
除此之外,还可以发现,自调机构中,当运动副B存在一定的角度误差时,运动副B和运动副B’不会产生转矩,从而避免了使圆柱销承受扭矩。
综合比较分析以上结果可知:气缸活塞执行机构自调机构中,不仅各运动副中的受力明显降低,而且变化均匀;同时机构运动副形位误差对机构性能的影响度降低,即机构对此处运动副的形位误差的要求降低。
 四、结论
四、结论
上述对气缸活塞执行机构及其自调机构的分析结果表明:经自调结构设计后的气缸活塞执行机构中各运动副的受力明显降低,而且变化均匀,从而有效的减小了运动副的磨损及系统弹性振动;同时,自调机构中运动副形位误差对机构性能影响的敏感度降低,从而降低了对运动副元素的精度要求,即降低了产品的制造加工成本。本文的工作为机构自调结构的分析与设计提供了思路和方法。
参考资料
安培文。平面连杆机构的过约束及自调结构的分析与设计研究(D)。重庆:重庆大学,2003。
秦伟。基于约束的自调机械结构理论与工程设计研究(D)。重庆:重庆大学,1999。
РешетовЛН。Самаустанавливющиесямеханиэмы(M)。Москва:Машиностроение,1985。
郑建荣。ADAMS―――虚拟样机技术入门与提高(M)。北京:机械工业出版社。2001。
李军。MSC。ADAMSFSP基础教程(M)。陶永忠,译。北京:清华大学出版社。2004
李太福。基于运动副自由度优化配置的机构自调性设计研究(J)。中国机械工程,2003,(14)23:2049~2052。
莫建清。自调自适应机构及其分析与综合(D)。重庆:重庆大学。2004。