近年来,随着电子信息技术和自动化技术的迅猛发展,以及现场总线和开放式总线技术的广泛应用,传统的机械式调节阀定位器已经越来越不适应信息化时代的要求。国外已生产销售从机械式、电子式过渡到智能型和总线型的电气阀门定位器(以下简称智能阀门定位器),其核心技术包括:具备人机交互、安装后自检自校、故障诊断与处理等功能。其中以德国SIEMENS的SIPART
PS/PS2采用压电阀式工作原理的智能阀门定位器,和以美国FISHER的DVC5000、日本YAMATAKE的SVP3000采用喷嘴挡板工作原理的智能阀门定位器为代表,形成了目前国际上智能阀门定位器的主流。
HVP08/09是重庆川仪自主研发的基于喷嘴挡板工作原理的智能阀门定位器,其技术已经达到国际先进水平。
一、工作原理
HVP08/09智能阀门定位器、气动执行机构与调节阀组成气动执行器,如图1所示。
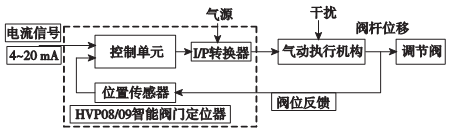
图1 气动执行器框图
图1中,HVP08/09智能阀门定位器与气动执行机构组成一个闭环控制回路,阀杆位移作为被控量,位移量通过位置传感器反馈到阀门定位器的控制单元。控制单元根据位移量与给定信号值的偏差,控制电/气(I/P)转换单元的压力输出,从而控制调节阀。HVP08/09智能阀门定位器,能很好地克服摩擦力和阀芯上的不平衡力,使其定位更迅速、精确。
HVP08/09智能阀门定位器采用仿人智能控制。气动阀门是非线性时变对象,每个调节阀都具有各自的量程、滞后、摩擦系数和气体泄漏等特性。HVP08/09智能阀门定位器通过自检完成对阀门特性的辨识与仿人智能控制参数的整定,自检过程流程图如图2所示。
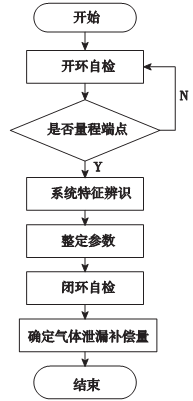
图2 自检流程图
图2中,自检过程开始后,执行机构在气源压力作用下开环自检,定位器对阀位信号进行采样,到达量程端点后,存储开环运行过程中的最大速度、平均速度和量程端点位置等特征信息到非易失性存储器中,存入的这些特征信息是仿人智能控制参数整定的依据。闭环自检采用仿人智能控制,控制阀门开度分别到50%、75%、100%再经由75%、50%回到25%,检测每个开度的气体泄漏量,并通过分段线性化的方法近似得到充气和排气过程中任意开度下的气体泄漏补偿量。
二、仿人智能控制算法设计
以PID为代表的线性调节规律,未能妥善解决闭环系统的稳定性与准确性、快速性之间的矛盾。
仿人智能控制算法依据目标轨迹在误差相平面上的位置,以及控制器的运行控制级、参数校正级,划分出特征状态级,从而构成不同级别的特征模型。
1、运行控制级设计
仿人智能控制的特征模型如图3所示。
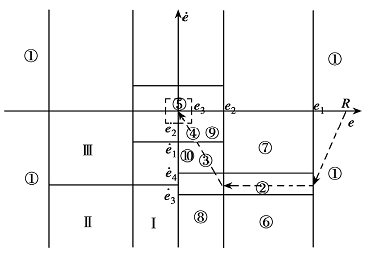
图3 仿人智能控制的特征模型
图3中,虚线所示的既为被控过程对象的理想误差目标轨迹fd(e,e)。为了使实际的误差轨迹尽可能地与理想误差目标轨迹一致,运行控制级采用的措施如下:
1)在偏差很大时,对应区域①,采用磅-磅控制。
2)在偏差及偏差变化率均很小(满足要求)时,对应区域⑤,为了消除误差,采用PID控制。
3)如果偏差较大,对应区域②,采用比例模态控制,同时为了保证偏差变化速度不是太大,在比例模态的基础上引入弱微分控制。
4)在偏差减小过程中,若偏差变化速度低于或者等于预定速度时,对应区域④,采用比例模态加微分模态控制。
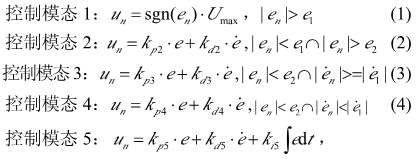
5)在偏差减小过程中,若偏差变化速度大于预定的速度时,对应区域③,在比例模态的基础上,引入强微分控制,使得偏差变化速度尽可能快的减小。因此,根据偏差e和偏差变化速度e,运行控制级可以划分为5个模态:

2、参数校正级设计
理想相轨迹是由阈值决定的,而实际相轨迹是由阈值和参数共同决定的。参数校正级采取的措施如下:
1)偏差变化速度超过限制值,对应区域⑥,应减弱比例控制作用,并引入微分作用,形成比例加微分控制模式;
2)偏差变化速度低于设定范围,对应区域⑦,增强比例作用;
3)偏差已经很小的情况下,如果偏差变化速度仍很大,对应区域⑧,通过参数校正,适当减弱比例作用,引入较强的微分作用,如果仍然不能满足要求,那么引入正反馈,形成很强的比例加微分控制模式;
4)偏差变化速度低于此时要求的速度,对应区域⑨,通过参数校正稍加大比例作用;
5)偏差已进入稳态要求,变化速度未进入稳态要求,对应区域⑩,通过参数校正稍减弱比例作用;
6)出现超调,偏差变化速度仍较大,对应区域Ⅰ,增强微分作用,减弱比例作用;
7)出现超调,偏差变化速度及此时偏差均较大时,对应区域Ⅱ,增强微分和比例作用;
8)出现超调,偏差较大而偏差变化速度不是很大时,对应区域Ⅲ,增强比例作用,减弱微分作用。
三、仿真研究
重庆川仪自产直行程阀HA1D,额定行程14.3mm,气源压力3.5kg,量程归一化,经辨识得传递函数为:
在MATLAB7.4的SIMULINK仿真环境中,建立仿人智能控制系统,控制器输出的饱和非线性环节取[-1,1];模态切换的阈值选取:e1=0.8,e2=0.4,e3=0.2,de1=0.4;de2=0.2;模态1:Umax=1;模态2:kp2=0.8,kd2=0.4;模态3:kp3=0.8,kd3=0.6;模态4:kp4=2,d4=0.8;模态5:kp5=5,ki5=10,kd5=0.5。
为了对比控制效果,选用PID+Smith控制器和最优PID控制器。最优PID目标函数选取ITAE性能指标:

PID参数采用单纯形法整定得:kp=1,ki=0.4,kd=0.5;PID+Smith控制器参数取kp=0.9,ki=0.4,kd=0.5,Smith预估器采用精确数学模型。
1、阶跃响应测试
3种控制方法的阶跃响应曲线如图4所示,性能指标见表1。
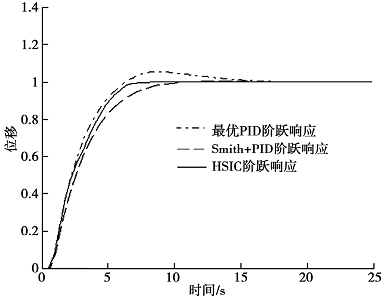
图4 跃响应曲线阶
表1 阶跃响应性能指标
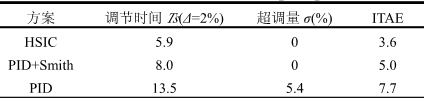
由表1可知,仿人智能控制器与PID+Smith控制器、最优PID控制器相比具有较好控制性能,阶跃响应速度快且无超调。
2、鲁棒性测试
为了检验控制器的鲁棒性,把控制对象变为
控制器的控制参数保持不变,3种控制方法的阶跃响应曲线如图5所示,性能指标见表2。
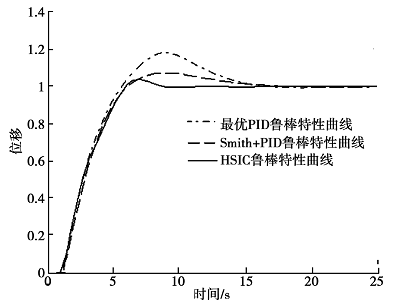
图5 鲁棒性测试响应曲线
表2 鲁棒性测试性能指标
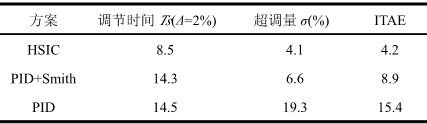
由表2可知,仿人智能控制器控制器在对象变化后,较之PID+Smith控制器与最优PID控制器依然具有更好的动态特性和稳态特性,具有更强的鲁棒性,更适用于非线性时变系统的控制。
四、应用研究
被控对象为重庆川仪自产的调节阀,其执行机构为HCP-I,公称通径DN200,额定行程75mm,气源压力4kg,定位器死区范围设为0.4%。位置传感器信号经A/D转换通过串口读出,采样时间20ms。经自检,阀门的端点位置为1 072和3 092,量程为2 020。
阀门开度在不同的位置滞后时间是不同的。端点位置较大,其它平衡位置较小。控制阀门开度从量程的50%到75%。对比算法采用的是积分分离的PID控制,仿人智能控制与积分分离PID控制曲线如图6所示。
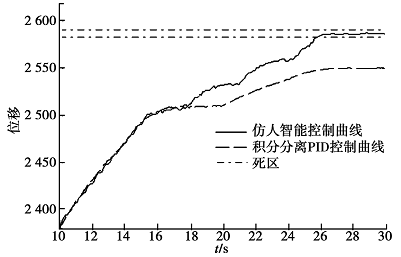
图6 阶跃响应曲线
图6中,积分分离PID控制曲线在2 500左右,速度接近为零,这时依赖积分作用增大控制量来克服静摩擦力,故会出现长时间静止或移动一定距离又静止的现象。而仿人智能控制通过切换模态进行参数切换,能够快速进入死区,满足定位要求。
有时由于气体泄漏的原因,阀门稳定后又会出现向下滑动的现象,需要再充一部分气才能稳定到目标位置,为此当检测到阀门向下滑动时,要对控制量进行补偿,补偿量是在自检过程中确定的。该阀门在稳定后,有向下滑动的现象,控制阀门开度从量程100%排气到75%,有、无补偿作用的对比曲线如图7所示。
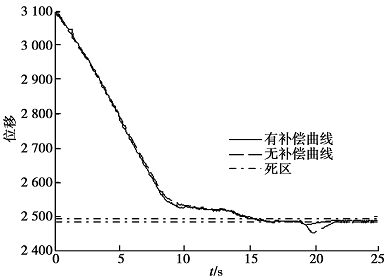
图7 补偿曲线
由图7可知,加入补偿作用能有效减小气体泄漏所造成的不利影响。
五、结论
智能阀门定位器自检过程完成对阀门特征的辨识,在仿人智能控制理论指导下,设计了智能阀门定位器的控制算法。仿真与应用结果表明,该算法具有较好的鲁棒性,采取对气体泄漏补偿的措施,能够有效减小气体泄漏所造成的不利影响。文中所述的分析方法及设计结论对此类工业控制过程的处理有一定的参考意义。






