内蒙古大唐国际托克托发电有限责任公司(下称托电)2号机组于2003年7月份投产,摆动燃烧器选型为JORDAN公司的SM5400系列,属于调节型执行机构,通过摆动燃烧器火嘴,以控制火焰中心位置,可以对蒸汽温度进行调节。投产初期摆动燃烧器电动执行机构运行良好,但是近两年以来,故障开始频发,出现不少问题,执行机构控制板烧毁,电源板损坏,执行机构齿轮连接部分损坏,执行机构外壳破裂等等,由于设备备件需要进口,采购周期较长,而且成本很高,维护起来很不方便,也不利于机组安全稳定运行。针对备件不够,故障率高等问题,热控人员根据电动执行机构控制原理结合现有的DCS控制手段,对就地控制回路重新设计,制订了改造方案,利用机组停机机会对摆动燃烧器电动执行机构进行改造,目前已全部改造完毕,设备运行良好。
一、执行机构损坏原因分析
托电2号锅炉由哈锅提供,属于四角切圆燃烧方式,每个角中部安装一台摆动燃烧器电动执行机构,紧贴炉壁安装,执行机构整体比较庞大,重达400kg。由于执行机构靠近炉壁,加之锅炉检修过后炉本体保温层隔热效果较差,执行机构所处环境温度较高,内部控制板及电源板损坏严重。由于损坏频繁,电源板和控制板已无备件可换;另外执行机构输出拐臂连着16个二次风门挡板,输出力矩相当大,当机械部分卡涩时,作用力就相当强,控制板损坏失控时,导致连接齿轮部分及执行机构外壳损坏,执行机构整体报废。以上情况出现时都会对机组安全稳定运行产生不利影响,容易产生不安全因素。4号角执行机构曾出现过长时间故障无法调整,被迫固定在一个角度的情况,总之,执行机构控制部分出问题,大部分都是由于控制板和电源板故障导致的。
二、执行机构改造方案
调节型电动执行机构控制都是通过指令和阀位反馈进行比较,然后通过一系列的集成化电子元件输出信号控制电机的正反转,以实现对执行机构的准确定位。根据以上控制原理,可以用西屋公司的OVATION工具进行组态,在DCS系统中设计组态软伺放回路代替控制板来完成控制功能.具体方案如下:
(1)DCS系统算法块计算执行机构的反馈与指令的偏差,根据偏差通过软伺放回路输出开关量信号(电机正反转指令)。
(2)执行机构的阀位反馈对执行机构控制起至关作用,需要对执行机构的反馈进行正确性、可靠性判断,以确定执行机构的实际阀位。
(3)由于是通过计算偏差控制,执行机构电机动作很频繁,电机容易损坏,所以必须设定必要的控制偏差死区,当进入这个死区,执行机构电机不动作。
(4)由于执行机构电机存在惯性,因此DCS输出的开关量信号设计为间隔脉冲信号,以防止超调过多发生振荡。
(5)由于执行机构在控制死区附近易产生振荡,频繁超出控制死区以致执行机构不停的开关调节,因此必须设定最多动作次数,防止损坏电机。
按照上面的控制思路,DCS系统组态控制逻辑图见图1。
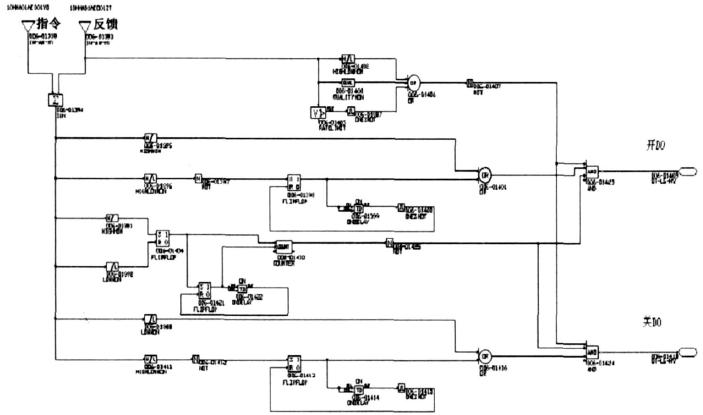
图1 DCS软逻辑控制图
从图1可以看到以下两点:
(1)对执行机构的阀位反馈信号进行3点正确性、可靠性判断:(a)阀位反馈高低限判断,若阀位信号突变到0以下或超出100,可确定阀位反馈装置出现故障,闭锁执行机构动作,防止执行机构电机损坏;(b)坏质量判断,阀位反馈信号不可监控时,闭锁执行机构动作;(c)对反馈信号变化速率进行判断,当反馈突变时闭锁电机动作几秒钟。以上3点是执行机构动作的前提。
(2)当指令与反馈偏差大于某个值时,直接发出开(或关)信号,此信号一直存在,当进入偏差死区区间时,输出指令信号为间隔脉冲信号,同时为防止在偏差死区附近执行机构振荡,通过计数块记录振荡次数,当次数超过设定值时自动闭锁输出指令。
另外,逻辑中的高低限、控制偏差死区、速率判断块以及计数块等参数设置要根据执行机构实际情况而定,DCS输出的是继电器动作的开关量信号。
根据组态好的DCS控制软逻辑,就地控制回路就是一般的开关门的控制回路。DCS发出的开关量信号和执行机构的开(关)行程开关以及力矩开关串联在一起,通过控制接触器来控制电机的正反转以实现调节阀的开与关。由于原有执行机构的电机是380V电源,而控制回路是220V的,需要增加380V至220V的变压器一台,再加两个控制开关接触器,具体的控制回路见图2。
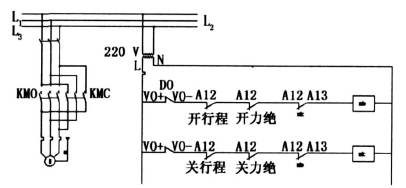
图2 就地硬回路控制图
改造过程中,原有的反馈属于外供电方式(也就是控制板供电),已不能使用,经过选型,用FISHER定位器的独立反馈装置替代,经过加工后可以使用,电缆可以用原来的。并在就地安置一个控制箱。
本执行机构属于电动调节型执行机构,由于控制过程中引入了开关量控制,因此此执行机构改造后可以成为“电动调节开关门”。
三、改造实施及结果评定
在2号机组停机时,对摆动燃烧器执行机构进行了改造。
(1)在DCS按照制定的方案进行软逻辑组态,经过编译下装后,使之成为实际逻辑,并为输出信号选定合适的输出通道(DO指令)。
(2)在就地设置一个控制柜,作为专门控制回路布线,拆除原有执行机构的控制板、电源板、位反电位器,保留行程开关和力矩开关,按照画好的控制回路进行接线,线号做好标志,位置反馈装置固定好,并通过首轮转动确定反馈输出信号是否正确,是否反映执行机构实际位置。
(3)DCS机柜与远方校线,接线。
(4)做好安全措施,检查逻辑及控制回路接线是否正确,送电,与锅炉专业共同进行定位调试,最后整体进行远方传动。
事实证明改造后的结果还是比较令人满意的。现以4号角的传动结果为例作一评论,指令反馈偏差见表1
表1 指令反馈偏差对照表 %
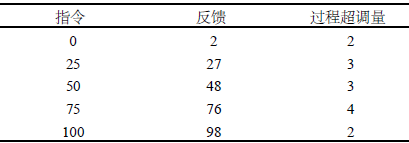
从以上数据可以看出,在给出75%的指令时,执行机构出现最大的超调,但最后的偏差也就是1%,而且实际执行机构动作过程中,阀门动作很灵敏,未出现振荡现象。
四、结论
通过对托电2号机组摆动燃烧器执行机构的改造,有效地消除了缺陷,就目前汽温控制方式而言,改造后的执行机构完全可以满足日常运行生产的需要,保证了机组的安全稳定运行。






