电动执行机构是构成过程控制系统的重要设备,在电力、冶金、石油、化工等行业有着广泛的应用。而采用高性能微处理器的智能电动执行机构一直是研究的热点问题之一。本文介绍了一种以DSP为控制核心、应用步进电动机作为动力、能够通过ZigBee技术进行参数设置的智能电动执行机构的研究开发工作。
一、电动执行机构的结构特点
传统的电动执行机构多采用感应式异步电动机或直流电动机机作为动力,电机经减速机构、输出轴驱动调节阀动作。控制器则按用户的要求控制电机旋转,使阀门运行到目标位置。电动执行机构在运行中需要对电流、阀门位置等参数进行实时测量,以满足系统在输出力矩、开关速度及输出轴位置等方面的要求。下面对电动执行机构的主要特点进行介绍。
1、应用三相混合式步进电动机作为动力
电动机是电动执行机构的动力源,其特征对电动执行机构的结构和性能具有重要的影响。新型的三相混合式电动机结合了两相和五相混合式步进电动机的优点,具有结构简单、控制方式灵活、控制性能好、性价比高的优点。
与采用直流或交流电动机相比,应用三相混合式步进电动机具有如下优势:
A、电机的行程由脉冲数决定、转速由脉冲频率决定,步距角仅为1.2度,无需精密的测速元件即可实现高精度的阀门位置控制和速度控制。
B、采用斩波电流控制时,可以实现精确的力矩输出,省去了传统执行机构中的机械力矩保护装置。
C、电机结构简单坚固,抗过流能力强,不易损坏,寿命长。4、电机功率密度大、出力大、有助于减小系统的整体体积。
2、以DSP为核心的控制器
电动执行机构选用TI公司生产的电动机控制芯片TMS320LF2406A作为控制器的核心。利用其最高可达40MIPS的运算能力和丰富的片上资源,电动执行机构不仅能够具有较高的控制性能,而且仅用很少的元器件就实现了全部控制功能,简化了系统结构、降低了系统成本。
3、通过ZigBee技术实现参数设置
电动执行机构的工作环境通常较为恶劣,应用现场可能存在爆炸性或腐蚀性介质。传统的打开机盖进行参数设置的方式,可能会造成执行机构内部电路受损,同时也可能导致安全隐患。因此用户越来越青睐采用不开盖即可对参数进行设置的非侵入式设计的产品。
ZigBee是一种专为工业控制、智能家居等应用开发的通信技术,具有低速、低功耗、低成本、传输距离远的优点。电动执行机构采用ZigBee技术实现控制器和遥控器之间的数字通信,可以完全实现非侵入式参数设置;克服了传统上采用的红外传输方式通信距离短等缺点,同时提高了传输速率和可靠性。
4、完善的保护功能
电动执行机构具有过流保护的功能,在通过电机绕组的电流超过设定值时,能够自动切断电源,达到保护设备的目的。执行机构还具有掉电保护的功能,通过定时向EEPROM中写入RAM中的系统运行参数,将在掉电情况下RAM中数据丢失造成的影响降到最低。
二、电动执行机构的硬件设计
电动执行机构可分为控制、驱动两个部分,硬件总体结构如图1所示。下面按照功能将其划分为不同模块进行介绍。
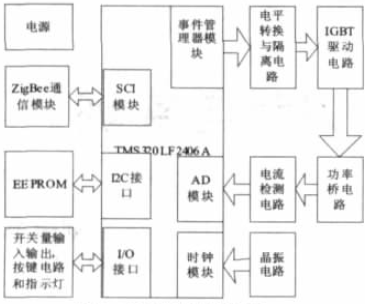
图1 系统硬件结构图
1、控制电路设计
A、PWM波形发生电路。利用TMS320LF2406A的事件管理器模块EVA产生六路PWM控制信号;通过74HTC245将DSP输出的3.3V电平信号转换为具有足够驱动能力的电平信号,经高速光耦隔离后到达IGBT驱动电路。本电动执行机构通过调节PWM的占空比控制流过电机绕组的电流,从而实现对力矩的控制。
B、电流检测电路。流过电机绕组的电流的大小决定执行机构的输出力矩,因而必须对其进行测量和调节。测流电阻上的压降经HP7840隔离放大后转换为差分信号,经一级运放放大转换后送到DSP的AD模块进行采样。采样得到的电流值供电流调节程序和软件保护程序使用。
C、ZigBee通信电路。电动执行机构采用Jennic公司生产的JN5139模块实现无线通信。通过将TMS320LF2406A的SCI模块与JN5139的UART模块连接,实现DSP与JN5139的通信;JN5139再和遥控器端的JN5139模块通信,从而实现了控制器和遥控器之间的ZigBee无线通信。遥控器不但可以对控制器的所有参数进行设置和调整,而且可以将相关信息通过自带的液晶屏显示出来。
D、EEPROM部分。实际运行中,电动执行机构定时向EEPROM中写入运行参数以减少掉电带来的影响。因为DSP上没有集成IIC模块,而选用的EEPROM基于IIC接口,所以本设计利用DSP的两个I/O管脚,以软件模拟IIC的方法实现了DSP与EEPROM之间的通信。
E、系统接口部分。利用DSP的I/O口分别实现了系统的开阀、关阀、停止和紧急等四个外部开关操作输入。系统还实现了一路4~20毫安的模拟阀位指令输入及一路4~20毫安阀位反馈输出。同时,系统还有两组拨码开关,可以对系统的参数进行设置;此设置功能和遥控器是并行的。
2、驱动电路设计
A、IGBT驱动电路。电动执行机构采用具有六路输出的IR2130作为IGBT的驱动芯片。IR2130有自举功能,可以驱动高压端的IGBT管。IR2130通过内部逻辑禁止同一个桥臂上的两个驱动管的控制信号同时导通,典型的死区时间为2μs。IR2130还具有过流保护的功能,当ITRAP管脚电平高于0.5V时芯片自动锁死所有驱动信号的输出;同时芯片的FAULT引脚产生报警信号,经光耦隔离后送入DSP的PDPINTA引脚可使DSP获得过流警报并锁死PWM输出;进入锁死状态的IR2130在接收到由DSP发出的特定信号后可以返回正常工作状态。
B、功率桥电路。电动执行机构用六个IR公司生产的IRG4BC30KD管构成三相驱动桥。该IGBT管耐压600V,在输入频率20KHz、占空比60%的方波信号时负载电流可达7A,内部集成了快恢复二极管,完全能够驱动本设计使用的三相混合式步进电动机。
C、电源部分提供控制器工作所需的全部电源,包括80V的电机工作电源,15V的IGBT驱动部分电源,CPU及控制单元所需的3.3V及5V电源。三部分电源相互隔离,且对它们之间的信号传输采用了相应的隔离,以减少共地带来的干扰。
三、电动执行机构的软件设计
电动执行机构的软件设计可以分为ZigBee模块和控制器两部分,下面分别进行介绍。
1、ZigBee模块程序设计
ZigBee模块程序基于JN5139模块的ZigBee协议栈进行开发,运行时应用程序和ZigBee协议栈轮流对模块进行操作。ZigBee应用程序主要由初始化函数、应用程序调用协议栈的函数和协议栈调用应用程序的函数等三类函数组成。
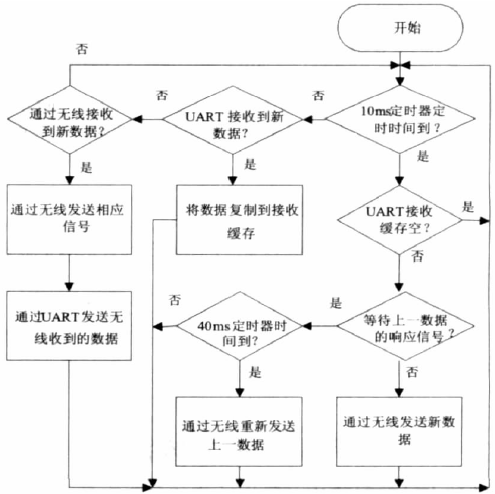
图2 ZigBee程序收发数据流程图
ZigBee模块程序可以按功能划分为三个部分:
A、组建网络部分。该部分决定ZigBee设备的类型(协调器、路由器或终端设备)、待组建网络的ID和使用的信道。网络由协调器节点建立;路由器节点和终端节点在启动后会自动寻找网络,并向找到的网络发出加入请求。
B、建立通讯部分。节点在加入网络后必须寻找可以与之进行通信的节点,程序采用服务发现的方式进行。首先,新加入网络的节点向其他所有节点发送自身服务的简单描述符;其他节点将接收信息与自身的服务相对比,如具有相同的服务则发送信息通知请求节点。
C、接收发送数据部分。这部分是程序的主体部分,包括通过无线接收发送数据和通过UART收发数据两个小部分。一个通过无线发送数据的完整过程包括本地节点的用户程序请求ZigBee协议栈发送数据、ZigBee协议栈响应请求、远程节点ZigBee协议栈将接收到的数据传递给应用程序并自动发送接收应答信号、本地节点接收接收应答等几个步骤。UART收发数据部分限于篇幅不再介绍。ZigBee模块接收发送数据的流程如图2所示。
2、控制器程序设计
TMS320LF2406A的程序设计采用C语言编程,采用前后台方式,可以分为主程序和中断子程序两部分。主程序属于后台任务。DSP在上电启动后首先进行自检;如果自检通过则开始系统初始化工作;然后将系统的组态参数从EEPROM读取到RAM中;随后使能中断;最后进入一个连续控制循环。系统的主要功能,如电机运动控制、电流控制和DSP与JN5139的通信等都由前台任务实现。下面以电机运动控制程序为例进行介绍。
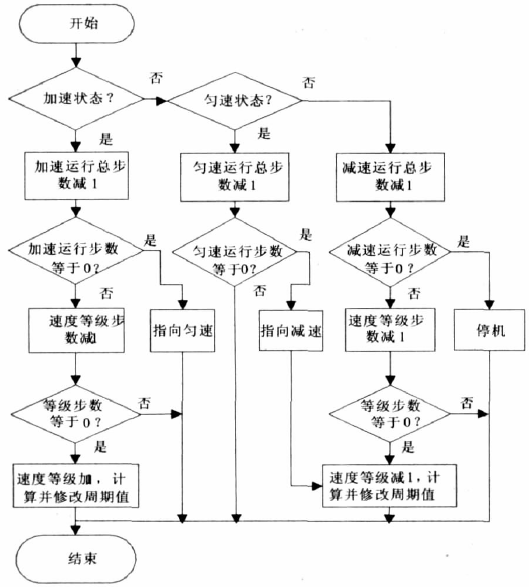
图3 电动执行机构加减速控制流程图
步进电动机的控制信号由DSP产生,主要控制作用包括换相顺序控制和加减速控制。
A、换相顺序控制。对于三相混合式步进电动机,通电换相方式决定其工作方式和转动方向。本电动执行机构的通电换相控制通过软件法实现,即按照指定的通电换相顺序,通过DSP的PWM输出端口向驱动电路发出控制脉冲。步进电动机工作方式的各通电状态对应的控制字被预先存储为一个表格,程序根据当前工作状态通过查表得到控制字,并将其送入比较方式控制寄存器,从而实现换相。
B、加减速控制。步进电动机的运行可以根据当前位置与目标位置之间的距离分为短、中和长三种情况;长距离情况下步进电动机的运行经历加速、恒速、减速三个过程。步进电动机的运行按照加减速曲线进行;其运行速度被划分为不同的等级,每上升或下降一级都要在该等级保持一段时间。不同的速度等级对应的旋转速度由定时器的周期寄存器值决定;寄存器值越大,步进脉冲的周期就越长,速度则越慢。加减速控制流程如图3所示。
四、结论
本电动执行机构采用三相混合式步进电动机为动力装置,相比传统的直流或交流电动机,在定位精度及输出转矩方面具有一定的优势;采用TI公司的TMS320LF2406A作为控制核心,实现了低成本高性能控制;采用基于ZigBee的智能遥控器进行系统参数配置,满足了现场非侵入式参数设置要求;试验表明本设计取得了预想的控制效果。
项目经济效益:项目为硕士研究生论文课题,所研制设备为试验样机,需经进一步的设计及认证方能成为最终产品。电动执行机构市场广阔,本课题为电动执行机构开辟了新思路,相信产业化后会有较好的经济效益。
本文作者创新点:
1、采用3相混合式步进电动机作为动力装置,有助于降低成本提高系统可靠性;
2、采用DSP作为控制核心,容易实现各种控制功能且控制效果好。
3、采用无线ZigBee技术实现非侵入式参数组态。






