通常的自诊断是采用一些测试手段配上专用自诊断软件得到大量的诊断数据,这样工厂操作人员需要花费时间和人力进行培训和进行自诊断测试,而工厂日常维护工作多、人力资源有限,因此要想通过
定位器的自诊断得到结论性信息,采用这种具有新设计理念的SAMAON 3730
定位器应该是个不错的选择。
采用新理念设计的数字定位器除了
控制阀位,还将自诊断功能集成在数字定位器里,能完成对在线所获取的数据进行记录、评估和预测,提供其自身状况及其他机械部件(如阀和
执行机构等)的状况信息,并将其状态信息显示在屏幕上,即直接在定位器上显示自诊断结果信息,同时还可按颜色如同“交通灯”分级分类显示在上位过程管理系统,使之引起工厂操作人员和维修工程师的注意,并通知他们进行相应操作或维修工作,降低工厂的停车次数和时间,为工厂长时间地安全运行和有计划地进行检修提供了有利帮助。
一、数字定位器的设计特点
定位器的最主要任务仍然是快速精确地响应过程控制系统指令将
调节阀开启到期望值。模拟定位器有精确实现这一功能的能力,却不能像数字定位器有自动的初始化功能、记录功能和各种设定功能。但受集成微处理器时钟周期的限制,数字控制算法不能像模拟信号实现即时动态响应。
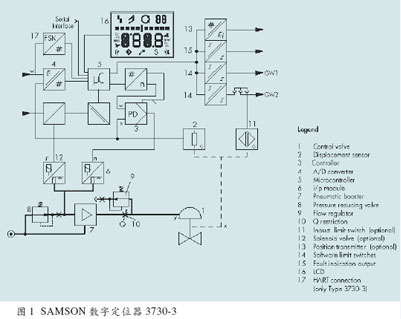
最佳解决方案是将数字元件和模拟元件组合在一起处理信号。这种理念设计的定位器,其输入设定点W(图1)有几种不同方式被采集记录。4~20mA两线制的
自动控制模式,设定点为过程控制系统发出的4~20mA模拟信号,它通过模/数
转换器(4)转换成数字信号;手动模式,设定点转换成数字信号,可以通过旋转按钮和显示器(16),或串行接口,或HART信号(FSK17);而现场总线系统中的自动模式,其设定点输入本身就是数字信号。
内置的PD控制器(3)利用数字设定点W和由位置传感器(2)测出的
阀门行程反馈信号X,产生一个内部驱动控制信号Y,以控制I/P 转换器(6)和气动增压器(7)。气动增压器通过改变执行器进气和排气的压力使阀位调节至期望值。
另外还有一个优点,设计了流量限制器(9)减少了定位器内部滞后,定位器内泄漏量非常小,此外,气动元件不间断充气的设计提高了定位器的可靠性。
PD控制器的控制参数借助数字电位计进行数字设定,因此,初始化期间阀门能获得最佳的控制参数。
这样PD控制器工作既用数字元件(设定点,控制参数)又用模拟元件(阀位,控制器)的信号,结果控制回路动态特性极好。
此外,定位器的紧急操作模式考虑了位置传感器故障。即定位器继续工作,利用以前记录的内部驱动信号Y和设定点W的关系式确定阀位,这样仍获得了几乎是所期望的阀位。
位置传感器信号X(图1,部件2)和内部驱动控制信号Y也都存入微处理器或存储器中,当进行智能化分析时,信号X,W和Y提供了大量的关于定位器、执行器和控制阀的状态信息。
 二、自诊断方法和在线的原始数据
二、自诊断方法和在线的原始数据
1、标准的自诊断
定位器在自动初始化和正常操作期间,采集所有的信息,删除所有可能导致故障的信息。自诊断主要是通过实时地进行状态数据检测、记录和比较,并发出错误通知。如:记录定位器状态数据和
限位开关状态数据,并对初始化、操作、硬件和数据等进行诊断,发出错误诊断通知。
各种状态和错误显示:限位开关状态;初始化错误;操作错误;硬件错误;数据错误。
在线信号监视:设定值信号;阀门行程位置;定位器输出至执行器的信号;行程偏差;行程累积器。
在线报警:控制回路定位故障;零点漂移(指示阀内件泄漏原于有脏物或磨损);行程累积器超限(提示需换填料);行程检测故障;I/P转化器故障,响应时间错误(供气压力低)。
诊断结果在定位器上用代码显示结果,上位控制系统还有文字描述。
2、无附加传感器的高级自诊断
标准的自诊断主要针对定位器本身,高级自诊断还包括对执行器、控制阀和气源状态等的自诊断,方法是对信号X,W和Y进行彻底分析,并报告错误。在线分析的内容如下:
■ 数据自动测定(停止-启动)
包括连续滞后偏差操作和休止操作两种模式。
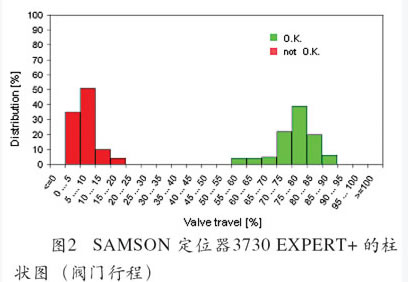
■ 依靠大量数据形成系统误差E、阀门行程W和循环周期的柱状图
在柱状图上,所监视的变量按级分类。所以,阀位可用百分比表示(图2),因此,所有柱状图长周期和短周期值不一样。这样的统计分析提供了非常重要的信息。
■ 最终位置记录
如果控制阀频繁关闭(开关控制),就能记录零点。“最终位置记录”可以指示是阀芯阀座磨损造成的零点漂移,还是由于行程变送产生的误差所致。
■ 阀门特征图,
绘制了阀位X随驱动控制信号Y变化的曲线。
信号Y是I/P转换器的内部控制信号,以阀位X为基准,信号Y几乎是线性的。就像
气动执行机构的供气压力。在自动初始化期间,检测这个曲线,并存入定位器供参考(图3)。
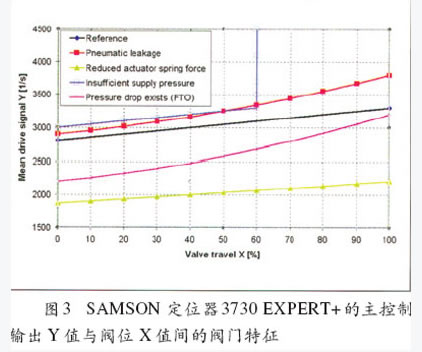
在控制阀两端的压差增高,因为介质中流体的推力与阀杆间的力平衡被打破,会导致定位器向执行器提供更高的压力,从而引起行程改变,因为介质中流体的推力与阀杆间的力平衡被打破。
类似地由于执行器中的一根或多根弹簧损坏,或其预压消失,则内部驱动控制输出Y和阀位X的关系被改变。对于故障关的控制阀,内部驱动控制输出Y比原先小。
供气压力比原来的高,或执行器和定位器之间有泄漏,则内部驱动控制输出Y和阀位X值变大,曲线上移。
定位器在线操作期间不断记录与阀位相关的驱动控制信号Y,并且计算出主值(依照阀位),每次初始化时都重新设定主值。
另外,可以用同样的方法对记录的数据进行分析,找出长周期或短周期内的变化。
当离线操作或工厂停车时,定位器可以对阀门进行全行程地实际测试,并核对在线记录数据。
通过滞后测试可以发现阀门摩擦力的变化。在标准的在线操作模式下,定位器不断检测设定点的变化,若设定点W在规定的误差允许范围(例如:1%)内变化,启动低级滞后测试。测试时,阀位按照斜坡改变,根据驱动控制信号Y和阀门行程X的变化将直接反映ΔF摩擦力的变化。为防止过程总受干扰,操作人员能够规定测试之间的最小观测间隔(例如:每天两次)。若设定点超过允许误差范围,则测试立即取消,定位器回到标准的在线操作。所有ΔF摩擦力的记录值分配到各自相映阀位范围内。
3、有附加传感器的高级自诊断在某些应用场合,操作人员需随时掌握阀门的内/外泄漏等级是否超标,可用前面所提到的自诊断方法得到间接信息,而想直接得到泄漏等级,需加传感器直接测量。因为阀杆密封有外泄就产生压力,所以检测阀杆密封采用压力开关,即可用压力开关测量阀门外泄。而阀门内泄指阀芯和阀座之间,及阀座与阀体之间的泄漏量,可采用抗磨损结构传感器,最好安装在上阀盖上,传感器不检查泄漏等级,只指示是否达到最大泄漏流量,即信号为开关量。因此有这种自诊断功能的定位器,还需在定位器上配备两个开关输入口及其相应的电子元器件。
三、自诊断与上位机的结合
目前,采用国际标准的HART工程软件,可将所有自诊断结论信息或其他信息通过HART命令或DD(DeviceDescription设备描述)文件读写。当然也可采用其他通讯方式例如:FOUNDATION和PROFIBUSPA 现场总线。总终实现将自诊断信息在各种上位控制系统和软件工具包进行存取,并在上位机显示和报警。实现这一功能可采用DTM(Device TypeManager设备类型管理器)软件,用它能传送数据和图形文件。上位机按照定位器分级分类自诊断信息,用不同的颜色如同交通灯(绿,黄,橙色及红色)表示。
四、结论
自诊断按其功能分:标准自诊断、无附加传感器的高级自诊断和有附加传感器的高级自诊断。标准的SAMSON 3730定位器兼具了前两种自诊断功能,任何一个过程控制系统通过DD或DTM软件都可读写和显示自诊断信息。在线对控制阀进行诊断不影响生产,自诊断信息即在定位器上就地显示又可在上位控制系统显示,且分级分类使操作人员和维修工程师不用进行专门的自诊断实验得到各自有用的诊断结果信息,指导他们及时了解和处理问题,提高了工作效率,也减少了工厂的非计划停车时间,定位器上记录的原始数据为判断控制阀寿命和完成自诊断柱状图提供了依据。






