电机是电动执行机构的动力来源。目前,电动执行机构的电机普通采用的是单相交流伺服电机和三相鼠笼感应电机。电动执行机构一旦投入运行后,电机将长期在频繁可逆运转状态下工作。所以要求电机的起动转矩大、起动电流要小、特别是转动惯量要小,以保证执行机构按控制信号快速、准确定位。电机的转动惯量是决定电动执行机构定位精度的关键因素之一,电机转动惯量小执行机构定位精度就高,电机转动惯量越大定位精度就越低。这是因为电机转子具有惯性,执行机构运行到预定位置后电机虽然已断电,但电机还会转动一定时间才能停止,造成电动执行机构惯性惰走,执行机构基本误差加大。执行机构用在闭环调节时,由于惯性惰走还会造成系统振荡。电机断电后阻止电机转动,使之减速或停转的措施称为制动。
目前国内、外电动执行机构的减速机一般都采用了带有自锁功能的蜗轮、蜗杆传动,减速机效率低,所配电机功率大。随着工业生产要求电动执行机构输出力矩的增大,电机也随之加大,电机转动惯量与要求执行机构快速精准定位的矛盾更加突出。长期以来为减小执行机构惯性惰走,提高执行机构精度采取了多种措施,当前解决这一问题较为有效的办法是克服电机的惯性,在电机上采取制动措施。
根据电机工作状态和使用要求不同,电机的制动方式有多种多样,但归纳为:机械制动和电气制动两大类。下面就适应电动执行机构工作特点电机的制动方式做一介绍。
一、机械制动
常用的方法是电磁抱闸式。它是利用电磁铁等机械构件,在电机通电时,电磁铁的吸力克服弹簧力,通过杠杆等传动件,将制动闸瓦与连接在电机转子上的制动轮分开,电机转动。
当电机断电后,靠弹簧力将制动轮抱住,使电机停转。傍磁式制动电机是我们自行设计一种成功适应执行机构的长期频繁可逆工作的机械制动方式的制动电机。电机通电后利用长出转子(定子长、转子短)部分的定子磁场,吸动弧形衔铁,通过杆杠将制动瓦与电机制动轮分开,转子即可自由转动。电机断电后,靠弹簧将制动瓦压紧制动轮,使电机转子停转。其结构特点是制动结构与电机一体化,无需外加电磁铁和电源,电机不通电时和其它电磁制动一样,制动闸始终抱紧电机转子制动轮。
电磁制动优点是不会因设备突然断电而发生故障。机械制动的缺点是:结构上因增加电磁铁制动闸瓦、制动轮、弹簧、传动件等机构件,体积增大,结构复杂,长期工作会造成机件磨损。所以目前电动执行机构电机大都采用电气制动的方法。
二、电气制动
电气制动种类及电路形式多种多样,主要有:反接制动能耗制动、电容制动、回馈制动等。每种制动方式各有特点,下面分别介绍适于电动执行机构的几种电制动方式。
1、三相电机的反接制动
电动执行机构的电机不仅可逆运转,而且动作十分频繁(电机允许每小时动作达1200次以上)。采用机械方式或一般的模拟电路难以实现电动执行机构三相电机安全可靠地反接制动。经我们多年研究,我们利用CPU微处理器的数字化电路控制电机正反转三相固态继电器,实现三相电机的反接制动,成功地应用在我公司独家引进的法国伯纳德数字化智能型执行机构中。
其原理是当电动执行机构运转到平衡位置时,该方向固态继电器关断,并立即接通反向固态继电器,此时反向旋转磁场与电机转子惯性转动方向相反,立即使电机转子减速停转,当转子转速为零时,立即切断电机电源,起到制动作用。利用数字电路可以十分准确地设定固态继电器反接导通的时间,反接时间从几毫秒到几十毫秒,所以可以安全、可靠地实现电机反接制动,而不会造成电源短路和反接制动时间过长(过长电机会反转)或过短(过短不足于克服转子惯性)。
此种制动方式特点是:制动迅速、制动力大、准确可靠、适应频繁工作。缺点是因制动极为迅速冲击力较大。且只有在控制电路工作正常时,制动才有效。
2、单相交流伺服电机的能耗制动
目前单相电动执行机构采用电机是两相绕组交替互为控制相,并互为激磁相的单相交流伺服电机。其控制电机正、反转电路及制动原理如图1。
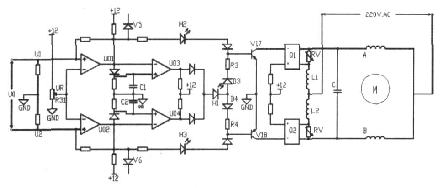
图1 单相电机驱动及制动原理图
执行器有偏差时,控制电压U0≠0,当U1>UR则U01为高电平,开关管V17饱和导通。固态继电器Q1导通,电机A相绕组为控制相,B相绕组通过分相电容C成为激磁相,电机正转。随着执行器运行到平衡位置,偏差减小,U1<UR,U01翻转为低电平,同时U03输出一个正脉冲,这个脉冲通过D3、R3及D4、R4使V17和V18同时导通,则固态继电器Q1和Q2也同时导通。两个固态继电器同时导通时间,由电路中C1和C2容量大小形成的脉冲宽度而定,一般几十毫秒。此时电机内部旋转磁立即变成不旋转的脉振磁场,转子惯性旋转时,转子导条切割磁力线产生感应电流,同时在转子上产生感应电流磁场,这两个磁场相互作用,使转子立即停转。反之,控制电机电压U2>UR时,B相为控制相,A相变为激磁相,电机反转。同理执行机构运转到平衡位置时,电机亦立即停转。整个制动过程是将转子动能转换成电能,再消耗在转子绕组(导条与短路环构成)上,故为能耗制动。
本制动电路的特点是:电机制动与控制电机正反转电路溶在一起,线路简单可靠、制动迅速、制动力强、适应频繁工作。
3、可用于三相电机及单相电机电容充、放电的制动
上述两种制动电路共同的特点是:控制电机均为电子开关,制动电路与控制电机运转电路溶为一体。
下面介绍与控制电机运转电路无关的一种应用广泛的制动方式。
工作原理见图2。
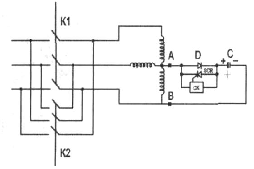
图2 可控硅开关的电容充放电制动原理图
制动电路A、B两点接在三相电机任意一相绕组一端、另一端接三相电机Y型电机中点。当电机通电后,A、B两点为相电压,经过二极管D对电容C进行充电,C为大容量的高耐压铝电解电容。电路中CK为单向可控硅触SCR保护及触发极逻辑控制电路,它确保在电机通电运转过程中,可控硅阻断(不导通)状态,只有在电机断电后才向可控硅触发极发出一个脉冲电流,使可控硅导通。SCR一旦导通,电容器C存贮的电能通过电机一相绕组迅速放电,此时相当于在电机定子绕组接入一个直流电源,于是在定子中产生一个静止的磁场。由于转子的惯性转动时,转子导条切割这个静止磁场的磁力线而产生制动力矩,使电机迅速停转,电容C瞬间完成放电。电机下次无论是正转还是反转,又重复上述运转―制动过程。
电机为单相时,A、B两点接在电机任意一相绕组两端即可。
该电路的制动特点是:
1)线路简单成本低,制动迅速,适于频繁工作。
2)由于制动电路仅与电机绕组相连,与控制电机的电子式开关或交流接触器等无关,原电机控制电路可不做任何改动,所以可直接用于目前电动执行机构(包括电动装置)上的各种单、三相小型电机的制动。
三、结论
机械制动在可靠性、机械寿命、结构体积、产品成本诸多方面都不适于电动执行机构,目前电动执行机构电机多采用电气制动。






