随着信息技术和自动化技术的发展,对电动执行机构的精度、性能要求不断提高,而传统的电子式电动执行机构难以满足要求。其原因在于:首先在执行机构的传动装置上,不可避免的存在摩擦和间隙,这些会使执行机构表现出非线性的特性,对系统正常工作带来不利的影响,造成开度调节过程中的震荡,造成执行机构不必要的频繁动作和较大误差。再有,电动执行机构在运动过程中,系统性能会随着执行机构的运行方向、机械磨损和负载的变化而改变,使得执行机构难以停留在预想的位置,为解决上述问题就要求电动执行器向数字化、智能化方向发展。另一方面电子式电动执行机构也适应工业控制的网络化发展。
目前国际上仪表行业的主要公司都开发了具有Profibus现场总线接口的电动执行机构产品,国内主要仪表生产厂家也开始研发该类产品。本文提出了一种基于现场总线的智能电动执行器的结构原理、控制算法和软件设计方案。
一、系统构成
执行器由执行机构和调节机构组成。执行机构是根据调节器控制信号产生推力或位移的装置,调节机构是根据执行机构输出信号去改变能量或物料输送量的装置,如调节阀。电动执行机构构成如图1所示,主要由控制器、伺服电机、位置检测装置和减速器4部分组成,控制器采集阀位给定信号和位置反馈信号,阀位给定信号是由上位调节装置经总线系统发送由现场总线接口接收。减速器输出的直线位移信号x(或角位移信号θ)经位置检测装置后形成位置反馈信号Uf送给控制器,控制器输出经过一个采用晶闸管作为开关元件的继电型非线性环节去控制电机的运转,电机带动减速机构产生相应的位移。
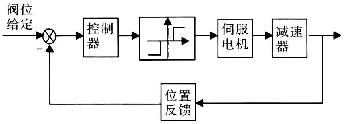
图1 电动执行机构组成
二、控制器的硬件设计
控制器系统硬件包括电动执行机构控制单元和PROFIBUS-DP总线从站接口单元构成,如图2所示。整个电动执行机构设计采用模块化设计,为此采用双CPU的结构方式,系统采用dsPIC30F6012A单片机作为电动执行机构控制单元中央处理器,采用AT89C55芯片,作为总线接口单元中央处理器,电动执行机构控制单元和PROFIBUS-DP总线从站接口单元之间通过串行通讯交换控制与运行状态数据。
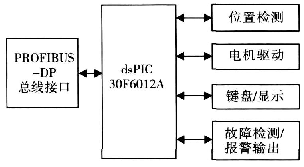
图2 控制器的硬件结构
1、电动执行机构控制单元
电动执行机构控制单元包括:位置检测电路、中央处理电路、电机驱动电路、键盘显示电路以及报警输入/输出电路组成。位置检测电路选用导电塑料精密旋转电位器作为位置传感器。电机驱动电路包括由固态继电器和正反互锁逻辑电路组成,完成电机正反转的启动、停止等控制。键盘/显示电路选用点阵型液晶显示器,故障检测/报警输出电路经光电隔离电路采集限位、过热等报警信号,输出报警信息。
2、PROFIBUS-DP总线从站接口单元
PROFIBUS-DP总线接口单元采用智能化接口芯片SPC3设计实现电动执行机构的从站通信功能。电动执行机构PROFIBUS-DP从站通信接口硬件结构见图3。
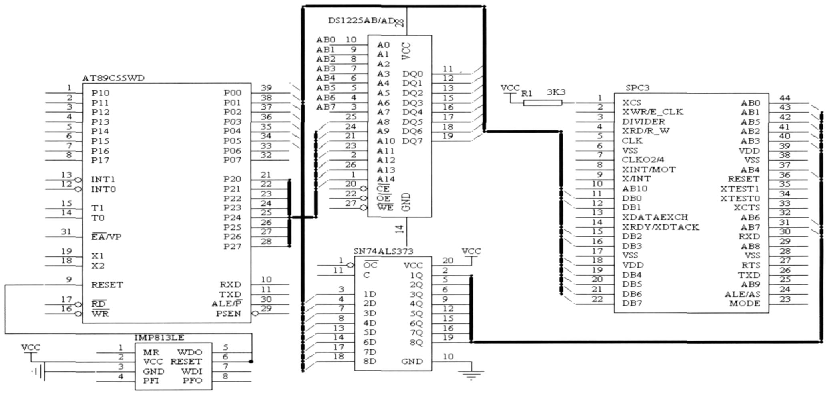
图3 PROFIBUS-DP从站通信接口硬件结构
三、智能控制算法及系统软件设计
1、智能控制算法设计
为实现电动执行器高性能稳定控制,防止系统中不灵敏区、间隙、摩擦等非线性因素造成开度调节过程中的震荡,造成执行机构不必要的频繁动作和误差,普遍采用的方法是在执行机构的控制系统中引入带死区的继电环节以改善系统的性能,但还是难以保证电动执行器的高性能稳定控制,本文在此基础上复合模糊控制算法以解决电动执行器控制难点。模糊专家规则模块以执行器位置偏差E及偏差变化率EC为输入,根据模糊专家规则确定控制器输出H,输出电机启停控制信号,控制电机的启停。模糊规则表如表1。
表1 模糊规则
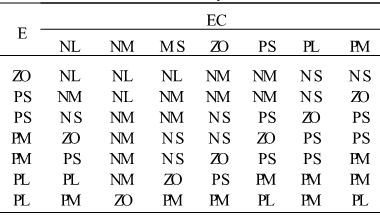
其中E,EC及H的模糊集为:{NL,NM,NS,ZO,PS,PM,PL},NL为负大,NM为负中,其余类推。各模糊集论域根据电动执行器中电机、减速器等配置参数依据专家经验确定。
2、软件设计
控制器系统软件包括电动执行机构控制单元软件PROFIBUS-DP总线从站接口单元软件两部分,总线从站接口单元软件采用C51语言设计,主要包括PROFIBUS-DP从站功能子程序和串行通讯程序两部分,其中串行通讯程序实现与电动执行机构控制单元的数据交换。
电动执行机构控制单元软件采用C30语言设计,包括初始化、数据采集、智能控制算法、电机驱动、键盘/显示、故障检测/报警输出、菜单功能、串行通讯中断子程序、定时中断子程序等功能子程序构成。其中数据采集子程序完成阀位信号的定时采集,故障检测/报警输出子程序负责限位、电机过热、电机过载等报警信号的检测和报警输出,电机驱动子程序根据智能控制算法子程序的输出实现电机正反转起停控制,键盘/显示子程序实现键盘扫描和显示刷新。软件主程序流程图如图4所示。
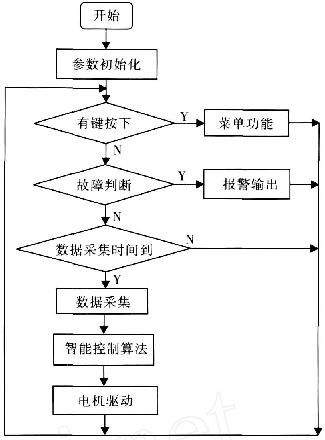
图4 主程序流程图
四、结论
针对目前电动执行机构存在的问题,本文采用高性能16位单片机设计了一种基于现场总线的智能电动执行器,设计了PROFIBUS2DP总线从站,使电动执行器具备了网络功能,并采用模糊控制算法来改善控制,经48h样机带载连续运行测试实验表明系统性能稳定,控制精度达0。5%,因此本设计方案能适用于自动化生产工业现场的环境。






