执行机构又称执行器,是一种自动控制领域的常用机电一体化设备(器件),是自动化仪表的三大组成部分(检测设备、调节设备和执行设备)中的执行设备。
电动执行机构的工作原理
电动执行机构主要由以下几部分组成:电机、减速器、位置发送器和伺服控制器。其原理框图见图1。
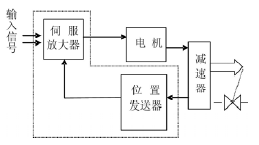
图1 原理框图
当伺服放大器输入端有一个输入信号时,此输入信号和执行机构的输出轴位置反馈信号(以下简称反馈信号)在伺服放大器内进行综合比较,当两者之差大于死区(也可理解为灵敏度)设定值时,执行机构输出轴就朝减小差值的方向移动,直到两个信号的差值小于电动
执行机构的死区时,执行机构输出轴就稳定在输入信号指定的位置上,进而达到调节调节阀(或风门等被控对像)开度的目的。
上世纪90年代以前,伺服放大器和位置发送器是分离的,进入90年代,随着电子技术的发展,以及来自国外先进产品的冲击,国内电动执行机构逐步将伺服放大器和位置发送器融为一体,体积、重量大幅降低,操作更加方便,即目前正得到广泛应用的伺服一体化产品。
常见故障及其快速排除方法
由于电动执行机构控制过程比较复杂,它涉及到电动执行机构的三大部分:电机、减速器和电气控制部分,但通常情况下电气控制部分出现问题而导致故障的可能性最大,下面介绍几种常见故障的快速排除方法。
1、执行机构不动作
说明:(见图2)
(1)“执行机构不动作”指给定信号(或叫控制信号)改变时执行机构没有响应。
(2)“就地手轮能否操动执行机构”指通过在现场操动执行机构自带的手轮,执行机构能否动作。
(3)“阀门卡死或执行机构卡死”:这里的阀门也有可能是风门、挡板等被控对象。如何判断是阀门卡死或执行机构卡死呢?可以把执行机构从阀门上取下来再进行进一步判断。
(4)“就地电动能否操动执行器”指通过在现场按下执行机构自带的手操按钮,执行机构能否动作。
(5)“电路板故障(电机驱动部分)或力矩超限”:如何判断是电路板故障还是力矩超限?如果执行机构有力矩超限报警功能,可以查看是否有报警信息;对于有力矩保护功能但没有报警功能的执行机构,一般都有力矩开关,此时请确认力矩开关是否动作。电路部分的故障除了电路板本身的故障外,如果电机为单相电机,还有可能是分相电容损坏。
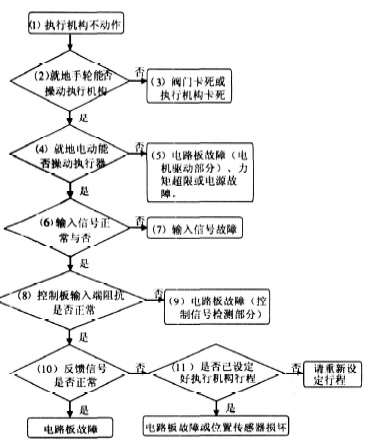
图 2 执行机构故障排除方法
(6)“输入信号正常与否”的判断方法可按如下操作进行:如果为开关量型,可直接用万用表的电压挡测量信号是否正常;如果为调节型,可将电流表串入执行器模拟控制信号输入端,看电流值是否与系统给定值相符。
(7)“输入信号故障”证明不是执行机构故障,控制信号有问题。
(8)“控制板输入端阻抗是否正常”的判断方法是先断掉执行机构电源,再断开输入信号,用万用表欧姆档测量模拟输入端的阻抗。对于调节型,输入阻抗一般应在500Ω以下(如果说明书上提供了输入端阻抗参数值,可进一步确定测量值是否与说明书一致);对于开关型或两位式,如果执行机构自带伺服控制板,输入阻抗一般应在1kΩ以上。
(9)“电路板故障(控制信号检测部分)”指执行机构控制电路板发生故障,这一故障为控制信号检测部分电路故障。
(10)“反馈信号是否正常”的判断方法如下:将执行机构分别置于全关位置、全开位置和中间任意一个位置,查看反馈值是否为0%、100%和介于0~100%之间的一个数。
(11)“是否已设定好执行机构行程”:如不确定是否已设定好行程,请参考说明书重新设定行程即可。(“行程设置”也有以下说法:零点和满量程设置、终端位置设置、全开位置和全关位置设置)
2、阀门泄漏过大
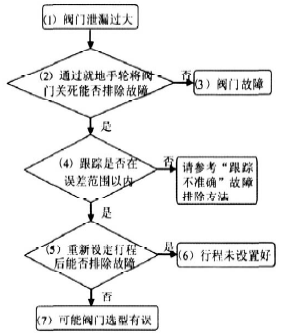
图3 阀门故障排除方法
说明:(见图3)
(1)“阀门泄漏过大”指执行机构全关时阀门仍有比较大的泄漏量。
(2)“通过就地手轮将阀门关死能否排除故障”的操作方法为先将执行机构切换到就地控制状态(有些执行机构在操作就地手轮时就会自动切换到就地控制状态),再操作执行机构自带的就地手轮,在阀门关死以前注意排除执行机构本身是否已经走到机构零位(如果出现此情况,需要重新调节阀门与执行机构输出轴的相对位置)。
(3)“阀门故障”:有可能阀芯损坏,或者阀门内有异物。
(4)“跟踪是否在误差范围以内”指执行机构的反馈值与给定值是否在误差范围以内,这个误差一般应小于1.5%。
(5)“重新设定行程后能否排除故障”:请按照说明书介绍的行程设置方法进行操作。某些执行机构可能带有限位开关,所以还有可能需要对限位开关进行调节。
(6)“行程未设置好”:一般说来应该是零点位置(或叫全关位置)没有设置好。
(7)“可能阀门选型有误”:如阀门形式、阀门口径、阀门填料等。
3、跟踪不准确
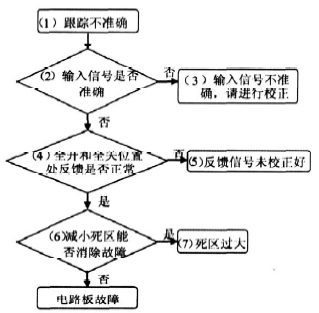
图5 跟踪不准确排除方法
说明:(见图5)
(1)“跟踪不准确”:或叫误差过大。
(2)“输入信号是否准备”:可用电流表直接测量输入信号的准确性。
(3)“输入信号不准确,请进行校正”:如果无法对输入信号进行校正,可更换相应IO模块试试。
(4)“全开和全关位置处反馈是否正常”:将执行机构操到全开和全关位置,再测量反馈输出是否为100%和0%。
(5)“反馈信号未校正好”:各种执行机构的调节方法都不一样,请参考说明书,但有些执行机构有调零和调满一说,其实这就是在对输出进行校正。如果以上方法还不能消除故障,试试重新设定一遍行程或许能奏效。
(6)“减小死区能否消除故障”:因为死区和精度有密切的关系,所以故障原因有可能是死区设得过大所致。
(7)“死区过大”:参照说明书将死区减小即可,如果执行机构未提供这一接口,那只能更换电路板了。
4、执行机构振荡
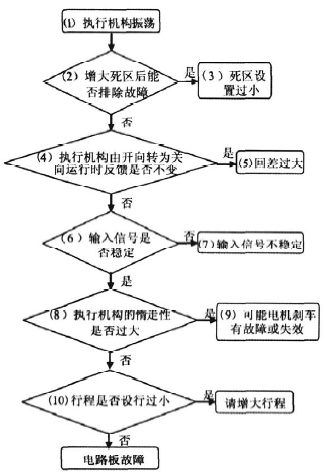
图4 执行机构振荡排除方法
说明:(见图4)
(1)“执行机构振荡”指执行机构在自动状态(或叫远控状态)下,控制信号没有改变而执行机构在某一位置来回动作几下或永远动作,或控制信号改变而执行机构在运行到指定位置时要来回频繁动作许多下才能停下来或根本停不下来。由于执行机构经常处于振荡状态下运行,严重影响执行机构的使用寿命。
(2)“增大死区后能否排除故障”有些执行机构提供了调节死区功能,请试着增大死区,如果增大死区能消除振荡,证明死区设得过小了。但死区与调节精度有密切的关系,死区增大,调节精度就减小,如果因死区增大而致使精度减小到允许误差范围以外,则此时通过增大死区来消除振荡的做法就不可取。
(3)“死区设得过小”:一般死区在0.75%~1.5%比较常见,如果对精度要求没有那么高,也有可能设到2.5%。如果您的死区设为0.5%,那么执行机构肯定会产生振荡,这主要是由于执行机构的惰走性和信号的不稳定性造成的。
(4)“执行机构由开向转为关向运行时反馈是否不变”:操作方法为切换到就地手操状态,先往某一方向操动执行机构,此时反馈信号有变化,然后再操动执行机构往相反方向运行,如果反馈信号要过一会儿才有变化,证明执行机构的回差过大了。
(5)“回差过大”:引起回差过大的因素主要是机械间隙过大。
(6)“输入信号是否稳定”:可以用电流表直接测量输入信号的稳定性。
(7)“输入信号不稳定”:可能需要更换对应的IO模块才能解决问题。
(8)“执行机构的惰走性是否过大”:由于电机转子有惯性,当切掉电机电源后转子还会继续转几圈才能停下来,所以在切断电机电源后执行机构输出轴还会继续运行一段距离,一般执行机构都带有制动装置,有接触式的(如刹车盘),也有非接触式的(如利用电磁力刹车的能耗制动方式)。
(9)“可能电机刹车有故障或失效”如果制动装置是刹车盘,一般都可以对它进行重新调节。
(10)“行程是否设行过小”:一般执行机构在出厂前都已设定好了标准行程,或者已限定了它的行程范围,如果您所设定的行程超过了限定值,特别是行程设得过小时,执行机构就有可能产生振荡。






