本文以电液伺服比例阀控液压缸为例,针对Matlab/Simulink在电液伺服控制系统仿真分析中的局限性,采用AMESim和Matlab/ Simulink联合仿真模型,取得了良好的效果。
一、系统组成及原理
电液伺服控制系统根据被控物理量(即输出量)分为电液位置伺服系统,电液速度伺服系统,电液力伺服系统三类。本文主要介绍电液位置伺服系统的仿真研究。其中四通阀伺服比例阀控液压缸的原理如图1所示。
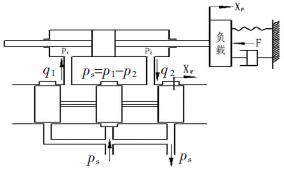
图1 阀控缸―负载原理图系统组成图
电液位置伺服控制系统是最为常见的液压控制系统,实际的伺服系统无论多么复杂,都是由一些基本元件组成的。控制系统结构框图见图2所示。
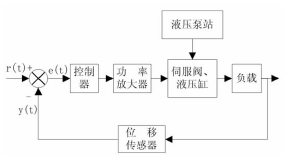
图2 电液伺服控制系统的结构框图
二、液压系统数学模型建立
活塞杆内径(直)d为45mm,活塞的行程H为40cm,液压缸外径为80mm,查手册知内径D为63mm从伺服阀到液压缸的长度为3m,管径为22mm,壁厚为4mm,供油压力恒定为7MPa,伺服比例阀MOOGD-633,d为7.9mm,阀额定电流为10mA,质量块(负载)为250kg。
液压缸有效工作面积为Ap为15.26cm2。
系统总压缩容积(液压缸和阀至液压缸两侧管路总容积)1072cm3。
因为位置系统动态分析经常在零位工作条件下,参见文献[3]可以得到描述了阀控液压缸的动态特性模拟公式(1)。
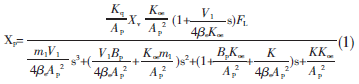
式中,Kce为总压力-流量系数,Xv为阀芯位移。Mt为活塞及负载总质量;Bp为活塞及负载的黏性阻尼系数;K为负载弹簧刚度;FL为作用在活塞上的任意外负载力。由于负载特性为惯性负载(K=0)Bp一般很小可简化为式(2)
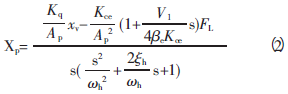
对指令输入为的传递函数为式(3)
则液压缸-负载的传递函数为式(4)
式中,
总流量压力系数Kce=Kc+Ctp,液压缸总泄露系数Ctp较阀的流量-压力系数KC小得多,所以主要KC来决定。零位压力系数

式中,rc为阀芯与阀套间隙的行向间隙w为阀面积梯度,μ为油液的动粘度,取μ=1.4×10-2 Pa•s,rc=5×10-6 m,对于全开口阀W=πd阀.W=24.8mm
得Kco=43.47×10-13 m•(N•s)-1 所以
根据经验得知在位置伺服系统中,当伺服阀在零位区域工作时ξh=0.1~0.2,本文取ξh=0.2可得液压缸数学模型为式(5)。
伺服阀的传递函数为式(6)。
根据D633伺服阀频率响应特性曲线图,可知ωsv=80Hz额定流量qn=40L/min的取阀压降为pL=2/3ps时的流量增益为
所以伺服阀的传递函数为式(7)。
所以系统的方框图如图3所示。
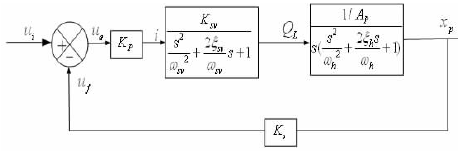
图3 系统方块图
三、基于Simulink的PID仿真
本文在Matlab软件中的动态仿真工具Simulink环境下采用PID控制策略进行仿真,如图4所示。
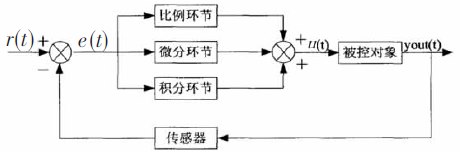
图4 PID控制系统原理框图
当取KP=0.0002,KI=0,KD=0时,和当KP=0.007,KI=0.01,KD=0.0005时,得到如图5图6所示液压缸实际位移曲线。
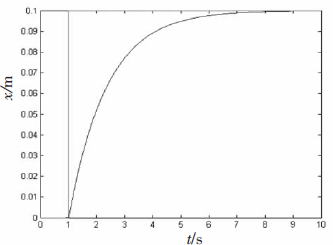
图5 液压缸位移与期望值的关系(KP=0.0002,KI=0 KD=0)
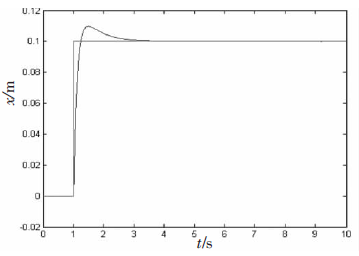
图6 液压缸位移与期望值的关系(KP=0.007,KI=0.01 KD=0.0005)
比较图5图6发现KP增大值时,系统的响应灵敏度增大,动态跟踪误差也减小了,在有静差的情况下有利于减少静差。但过大的比例系数会使系统有较大的超调,产生振荡,使稳定性破坏。增大积分系数KI有利于减少超调,减少振荡,使系统更加稳定,但过大的积分系数会使系统变得不稳定。增大微分系数KD有利于加快系统的响应,使超调量减少。
四、AMESim/Simulink联合仿真技术的优点
由于液压元件本身所包含的非线性,难以建立精确的数学模型。所以本文采用AMESim与Matlab/Simulink联合仿真平台对电液伺服系统中的机械液压部分和控制部分分别进行建模,充分利用两套软件各自在液压系统建模仿真与数据处理能力方面的优势对电液伺服系统进行联合仿真分析。
Simulink借助于MATLAB强大的数值计算能力,能够在MATLAB下建立系统框图和仿真环境,在各个工程领域发挥着巨大的作用,是当今主流的仿真软件。但MATLAB存在不能有效地处理代数环问题等缺点,使得Simulink仿真效率往往不高。利用AMESim对Simuhnk的接口技术,把两个优秀的专业仿真工具联合起来使用,就能既发挥AMESim突出的流体机械的仿真效能,又能借助MAT-LABlsimulink强大的数值处理能力,取长补短,取得更加完美的互补效果。这种联合仿真的技术对多领域系统(如流体与控制结合系统等)的仿真效果更是无与伦比。
本文把位移作为输出量,在AMESim中的界面菜单下的创建输出图标功能与Simulink中的S函数实现连接。具体实现过程是在AMESim中经过系统编译、参数设置等生成供Simulink使用的S函数,在Simulink环境中,将建好的包含其它Simulink模块的AMESim模型当作一个普通的S函数对待,添加入系统的Simulink模型中。从而实现AMESim与Simulink的联合建模与仿真。根据物理模型,把系统分为机械系统和控制系两部分,机械系统模型由AMEsim建立,控制系模型由Simulink建立,则得到联合仿真环境下的模型分别如图7和图8所示。
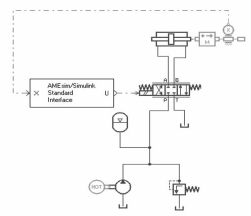
图7 联合仿真AMESim环境下的液压系统模型
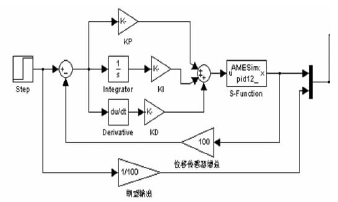
图8 Simulink环境下的电液伺服系统模型
联合仿真中PID控制参数取为Kp=1.5,KI=0.001,KD=0.002系统输入一阶跃信号得到活塞杆的位移曲线,见图9所示。
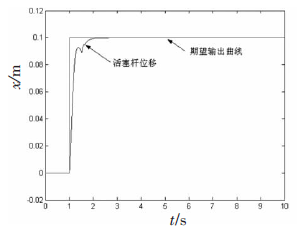
图9 液压缸活塞实际输出位移与期望值曲线
联合仿真中PID控制参数取为Kp=17,KI=0.3,KD=0,系统输入一正弦信号得到活塞杆的位移曲线,见图10所示。
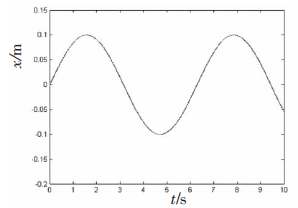
图10 液压缸活塞实际输出位移与期望值曲线
由图9图10可以看出,活塞杆位移曲线与系统输入的阶跃信号曲线和正弦信号曲线非常接近,系统稳定仿真效果是非常不错的。
在液压缸的参数设置中,有这样1个参数―死区容积(DeadVolume)。死区的油量越大,油液的可压缩性就越明显,系统就越不稳定。在默认情况下,该值为50cm3;如果把死区容积改为20cm3,得到液压缸活塞杆实际输出位移与期望值如图11和图12所示。分析图10和图11所示曲线可以看出,系统的振荡就明显变小。在Simulink中很难体现死区体积对整个系统的影响,与AMESim相比这也是一个不足之处。另外蓄能器在系统中作为泵的辅助能源,也是系统吸收振动的元件。在没有蓄能器的情况与有蓄能器相比,系统更容易会出现振动,稳定性不够。所以在系统中安装蓄能器是非常有必要的[5]。而在Simulink中很难体现蓄能器对整个系统的影响。
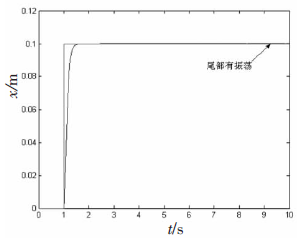
图11 液压缸活塞实际输出位移与期望值曲线
(KP=2.8,KI=0.002,KD=0.002,DeadVolume=50cm3)
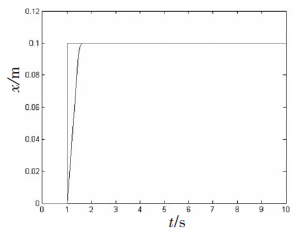
图12 液压缸活塞实际输出位移与期望值线
(KP=2.8,KI=0.002,KD=0.002,DeadVolume=20cm3)
五、结论
(1)建模过程与仿真结果表明,对系统建立正确的数学模型并进行分析仿真,分析系统的动态特性,可以有效地预见系统的输出,达到对系统工作状态的了解,提高了设计和分析系统的效率,为进一步控制系统,提高响应速度和控制精度奠定了一定的基础。
(2)从上面可以看出利用AMESmi与Matlab/Simulink各自优点的联合仿真技术开创了一条效果很好而又不很复杂的仿真新途径。这种仿真技术更加准确的模拟了实际系统的工作状态,必将在工程领域(尤其在电液伺服控制领域)得到广泛应用。






