现场总线以一种串行的、数字数据通信链路的形式,在分布于生产及过程现场的基础控制设备之间以及与控制室里较高层的自动化控制设备之间建立联系。现场总线及相关技术的引入,改变了分散控制系统的结构体系。新的控制系统被称作现场总线控制系统,它是全分散式的和开放式的系统。Modbus属于现场总线的一种,它是有效支持分布式控制或实时控制的串行通信网络。
调节阀是管道系统中应用最广泛的执行机构。目前,常用的调节阀门按其动力源的不同,可分为气动阀门、液压传动阀门和电动阀门。随着机电一体化技术的发展,电动阀门在工业生产中表现出巨大的优势,越来越多地应用到工业控制现场和民用自动控制系统中。电动阀门由阀门电动装置和阀门两部分组成,可以接受操作人员或自动装置的命令,自动截断管道中的介质流量。与气动阀门和液压传动阀门相比较,它具有动作响应速度快、工作效率高、调速性能好和操作简便等优点。随着时代的发展,这些产品在日益激烈的市场竞争中已经暴露出了许多劣势和不足,比如结构复杂,控制精度低,缺乏完善的故障诊断、报警和处理装置。
针对农用电动阀门存在的不足,为了适应现代工业发展的要求,提出了一种基于Modbus现场总线的智能农用阀门电动执行机构控制系统的新设计方案。
在克服了传统电动阀门不足的前提下,增加了许多新功能,拓展了使用领域,改善了性能指标,实现了电动农用控制的数字化,扩展了现场总线的智能通讯接口,并兼容Modbus通讯协议。
一、Modbus现场总线通讯原理
1、Modbus的RTU传输模式
RTU模式中,信息开始至少需要有3.5个字符的静止时间。各个区允许发送的字符均为十六进制的0~9,A~F。网络上的设备连续监测网络上的信息,包括静止时间。当接收第1个地址数据时,每台设备立即对它解码,以决定是否是自己的地址。发送完最后一个字符号后,也有一个3.5个字符的静止时间,然后才能发送一个新的信息。整个信息必须连续发送。如果在发送帧信息期间出现大于1.5个字符的静止时间时,则接收设备刷新不完整的信息,并假设下一个地址数据。同样一个信息后,立即发送的新信息(若无3.5个字符的静止时间)将会产生一个错误,这是由于合并信息的CRC校验码无效而导致的。
2、Modbus的域
信息地址包括2个字符(ASCII)或8位(RTU),有效的从机设备地址范围为0~247(十进制),各从机设备的寻址范围为1~247。主机把从机地址放入信息帧的地址区,并向从机寻址。从机响应时,把自己的地址放入响应信息的地址区,让主机识别已做出响应的从机地址。地址0位于广播地址,所有从机均能识别。信息帧功能代码包括字符(ASCII)或8位(RTU),有效码范围为1~225(十进制)。数据区有2个十六进制的数据位,数据范围为00~FF(十六进制)。根据网络串行传输的方式,数据区可由一对ASCII字符组成或由一个RTU字符组成。
3、Modbus错误校验
标准的Modbus串行通讯网络采用两种错误校验方法,奇偶校验和信息帧校验(CRC)。CRC检测使用于RTU模式,CRC域检测整个消息的内容。CRC是先调入一值是全“1”的16位寄存器,然后调用一过程将消息中连续的8位字节与当前寄存器中的值进行处理。仅每个字符中的8bit数据对CRC有效,起始位、停止位以及奇偶校验位均无效。CRC产生过程中,每个8位字符都单独和寄存器内容异或,结果向最低有效位方向移动,最高有效位以0填充。LSB被提取出来检测,如果LSB为1,寄存器单独和预置的值或一下;如果LSB为0,则不进行。整个过程要重复8次。在最后一位(第8位)完成后,下一个8位字节又单独和寄存器的当前值相或。最终寄存器中的值是消息中所有的字节都执行之后的CRC值。
二、智能农用阀门电动执行机构系统总体设计
智能农用阀门电动执行机构是在阀门机械执行机构的基础上开发的自动控制系统,能在最大程度上对阀门的工作进行操纵、监控和系统安全保护。电动阀门智能控制器能够通过Modbus现场总线接收控制中心的命令信号和阀门实际工作的反馈信号,实现对阀门正转、反转或停转的闭环控制,还可以进行故障报告、应急处理、显示和键盘控制等功能。
系统总体结构如图1所示。本系统主要由控制器、力矩检测机构、行程检测机构、人机界面(液晶显示,旋钮,红外设定)和执行器(驱动电机,减速器)等组成。
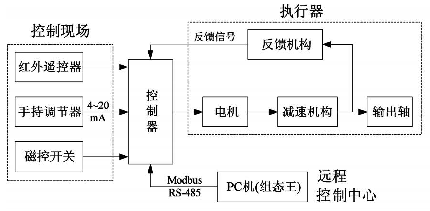
图1 智能农用阀门电动执行机构总体设计方案
在以电动执行机构作为最终执行装置的自动控制系统中,传统的方法的以调节仪表输出的模拟信号去控制电动执行机构动作,而且老式的电动执行机构比较笨重,伺服驱动器和执行器两大部分分成两块,在实际应用中很不方便。新型电动执行机构则是将位置反馈信号A/D转换后输入微处理器,在微处理器内与控制中心信号(数字信号)比较,比较后输出开关信号,驱动执行器动作。系统也可通过RS-485总线与PC机相连。上位机采用工控软件组态王,通信协议为简单可靠的Modbus,实现远程设置、监控和故障诊断等功能。
本阀门电动执行机构主要由控制器和执行器组成,它是以标准三相、三线额定电源(50Hz,380V)交流电源作为驱动电源,接受来自控制中心DC4-20mA或者DC1-5V控制信号(或者是PC机传递给控制器的设置值),并将其转换为相应的输出轴角位移,去操纵调节阀。由图1可看出,阀门电动执行机构的控制过程是一闭环控制,通过设定信号和反馈信号的比较控制电机运转,驱动阀门动作。借鉴现阶段已有的技术,控制器采用功能强大的微处理器C8051F020作为控制器的核心,可以尽可能少地去扩展外围电路,从而减小体积、减少故障概率,再配以相应的功能电路,执行器的驱动电机采用短时工作制的三相异步交流电机,或减速机构采用蜗轮蜗杆等,明显简化了系统的结构,降低了成本,提高了控制精度。
三、阀门电动执行机构控制器部分硬件设计
1、前向采样通道
A、阀位行程
阀位行程检测采用格雷码输出的多圈绝对编码器模块。绝对编码器随着电机的旋转处于不同的位置时,它送出的数值不同,每一个数值和一个角度相对应。由于绝对编码器可以以标准逻辑电平输出数字编码,所以只要把绝对编码器的输出直接接到单片机的输入即可。
B、(4~20mA)电流输入
为减小模块占用体积,提高可靠性,缩短开发周期,4~20mA输入模块选用深圳顺源公司的直流电流信号隔离放大器ISO-A4P104。顺源ISO系列隔离放大器在同一芯片上提供了电源及信号的隔离。该混合集成芯片在同一芯片上集成了磁电耦合DC/DC变换电源及电流输出的光电耦合隔离放大器。
C、A/D转换
C8051F020芯片引脚有8个专用于模拟输入,是8路12位ADC的输入端,每路12位的转换精度都是其自身的±1LSB(最低位)。一般在启动ADC之前都要处于跟踪方式,复位时ADCxCN的位7为0,处于关断状态。一般在转换之前还自动加上3个系统时钟的跟踪/保持捕获时间。每次转换结束时,ADCxCN的位5为“1”,位4的下降沿触发结构中断,也可用软件查询这些状态位。
2、后向控制通道
A、电机正反转
电动机采用两级继电器进行驱动,即CPU并口通过光耦控制电路板上小型继电器的动作,小型继电器的触点输出控制交流接触器的通断。根据阀门需求,电机必须双向可控,因此用两个交流接触器分别控制电机正转与反转。
B、(4~20mA)电流输出
同样采用了广东顺源公司的集成模块,原理同上文的4~20mA输入模块。D/A输出0~2.5V的电压,作为该模块的输入来输出4~20mA的线形电流。
C、D/A转换
C8051F020器件都有两个片内12位电压方式数/模转换器(DAC),可以用对应的控制寄存器DAC0CN和DAC1CN使能/禁止DAC0和DAC1。每个DAC的电压基准在VREFD引脚提供。使用内部电压基准时,为了使DAC输出有效,该基准必须被使能。
3、人机交互部分
A、液晶显示电路部分
液晶显示模块采用深圳新烨达公司的YXD-12864M。该系列模块是图形点阵液晶显示模块,主要由行驱动器、列驱动器及128×64全点阵液晶显示器组成,可完成图形显示,也可以显示4×8个(16×16点阵)汉字。
B、磁控开关技术
磁控开关是利用磁场信号来控制的一种线路开关器件。磁控开关又称为干簧管。干簧管的外壳一般是一根密封的玻璃管。在玻璃管中装有两个铁质的弹性簧片电极,玻璃管中充有某种惰性气体。平时玻璃管中的两个簧片是分开的,当有磁性物质靠近玻璃管时,在磁场磁力线的作用下,管内的两个簧片被磁化而互相吸引接触,使两个引脚所接的电路连通。外磁场消失后,两个簧片由本身的弹性而分开,线路就断开。
C、红外遥控技术
红外遥控是无线、非接触式控制技术,具有抗干扰能力强、信息传输可靠、功耗低、成本低以及易实现等显著的优点。本系统使用特制的本安型红外调试器RC-01,对执行机构的力矩值、行程值和控制方式等其他参数进行简单、安全、快速以及非侵入式的调整与设定。
4、通讯电路
RS485串行通讯接口选用美国TI公司的75LBC184。本设计系统中,通信波特率用户可自行选择,可选4.8k,9.6k,19.2k,完全可满足本通信系统要求。接收器的独特设计是:当输入端开路时,其输出为高电平。这一特性保证接收器输入端电缆有开路故障时,不影响系统的正常工作。
四、阀门电动执行机构控制器部分软件设计
电动阀门智能控制器的软件采用汇编语言进行编程,如图2所示。
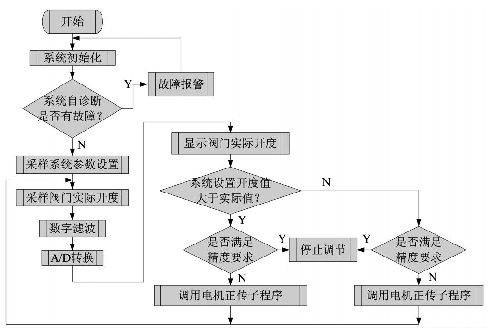
图2 智能农用阀门电动执行机构软件框图
现场总线通讯部分采用C高级语言进行编程,软件设计主要包括以下几个部分。
1)主程序。负责系统各功能子程序的协调以及调用。
2)初始化子程序。完成系统的自检测及内部资源的分配。
3)采样和滤波子程序。完成阀门参数的实时采样以及数字滤波,将其转换成4~20mA标准的电流或+5V电压信号。
4)模/数转换子程序。将4~20mA标准的电流或+5V电压信号转换成数字信号,然后输入中央处理单元。
5)控制子程序。完成数/模转换,发出控制命令,驱动执行机构,带动电机转动。
6)通讯子程序。按照现场总线的Modbus协议,完成上位机与现场各个电动阀门之间的通讯。上位机远程发送控制命令,下位机向上位机转送阀门的运行参数。
7)显示子程序。显示阀门实际开度值,并对阀门运行状态进行实时显示。
五、结语
本文提出了一种基于Modbus现场总线的智能农用阀门电动执行机构控制系统的新设计方案。本控制系统采用了智能控制、自校正、自诊断和数字通信等技术,改变了传统的阀门电动执行器控制结构,实现了在生产现场的全分散控制,节约了大量的信号电缆,增加了系统的实时性和可靠性,并且真正实现了电动阀门的数字化和智能化。