随着科学技术的发展,利用先进的CAD/CAE工具对机械系统开展研究已经成为一种趋势。图解法等传统方法,对机构进行运动学或动力学分析时,需要经过大量的图解计算与分析计算,其效率和精度低。而利用Pro/Engineer软件中的Mechanism模块对构建的三维数字化机构模型进行运动仿真分析,不仅可以观察整个机构的实际运动过程,而且可以直接方便的获取关键点的位移、速度、加速度、作用力、反作用力等数据。这样设计人员不需要等待试制样机就可提前对设计中可能出现的问题做出精确的预测和改进。
本文利用Pro/E软件完成了凸轮阀体机构的建模,并运用中Mechanism模块对其进行了运动学仿真和动力学分析。
一、机构造型
1、三维实体的建模
Pro/E软件是基于特征的完全相关的参数化三维实体建模软件。任何一个复杂零件都可通过拉伸、旋转、孔、壳、混合、扫描等众多特征和构造特征创建而成,同时零件尺寸都用参数描述,并在设计时可通过修改参数值来改变零件的外形。此外,用户在产品开发的任一环节进行参数修改,都将被传送到整个设计中,同时自动地将装配模型、平面工程图等工程文档进行更新。Pro/E实体造型的方法多种多样,例如圆柱模型既可通过拉伸特征创建,也可通过旋转特征获得,但是旋转生成模型的速度会更快,生成文件的体积也更小。因此在建模前必须分析各零件的特征组成,及确定零件特征的创建顺序,然后选择适当的方法进行建模和添加工程特征等设计,完成凸轮阀体机构中所有零件的三维实体模型。
下面以凸轮轴和摇杆的创建过程为例来叙述建模的主要步骤:
A、凸轮轴的主要创建步骤
(1)利用拉伸特征创建轴;
(2)在轴上适当位置创建凸轮的草绘平面和角度参考平面,利用拉伸特征创建凸轮1;
(3)复制创建凸轮2;
(4)利用倒圆角特征创建倒圆角。凸轮轴模型如图1。
图1 凸轮轴
B、摇杆的主要创建步骤
(1)利用拉伸特征创建摇杆的大孔;
(2)利用旋转特征创建摇杆与针阀的连接部分;
(3)利用孔特征挖出摇杆与针阀的连接孔;
(4)利用拉伸特征创建摇杆上的连接筋;
(5)利用拉伸特征创建摇杆与滚轮连接部分;
(6)利用孔特征创建摇杆上的小孔。
在创建过程中,通过设置适当的基准线和基准面,连接前后特征,同时分别利用倒圆角特征创建倒圆角使模型外行更加美观。
图2 摇杆
2、三维建模的装配
装配是动态仿真的前提,装配关系的正确与否,直接影响动态仿真的效果。由于凸轮阀体机构运动仿真时,各构件间存在相对运动,所以零件的装配只能部分约束。根据构件间的相对运动情况,通过设定各种连接来限制构件的自由度。装配时,先确定运动构件及构件间的运动副,然后选择构件及相应的运动副组成机构,最后由各机构组成完整的凸轮阀体机构。
即装配时将转动件的连接设置成销钉连接,将移动件的连接设置成滑动连接,防止在后续的运动仿真分析中失败。
凸轮阀体机构的主要装配步骤如下:
(1)摇杆部分的组装,即将摇杆、轴、小滚轮等零件组装在一起,此时将小滚轮与轴之间用销钉连接,其他零件间刚性连接;
(2)针阀部分的组装,即将针阀、衬体、支撑等零件组装在一起,此时将所有阀体部分零件刚性连接;
(3)创建凸轮阀体装配骨架,利用该骨架确定各子装配体的安装位置;
(4)凸轮阀体机构的总体组装,此时分别将凸轮轴、针阀部分、摇杆部分和摇杆支承轴安装在装配骨架上,其中在凸轮轴、摇杆支承轴间设立销钉连接,装配模型如图3所示。

图3 凸轮阀体机构装配图
二、仿真分析结果
在Pro/E的Mechanism模块下,机构的运动仿真主要通过以下三个步骤进行:
(1)运动环境的设置。主要包括伺服电机的设置、凸轮从动机构连接的设置、弹簧的设置、运动分析类型的设置。该凸轮阀体机构在凸轮轴上设置一个伺服电机,在凸轮轴与摇杆小滚轮间,摇杆另一端与针阀间分别设置凸轮从动连接装置,并选取动态分析模式。
(2)运行机构运动分析。通过产生可视化的机构运动过程,完成对机构的运动学分析和运动干涉检查,并保存运动分析结果。
(3)进行分析测量。分别获取摇杆小滚轮受到的法向载荷、弹簧受到的载荷、针阀与摇杆接触点的X向、Y向速度与加速度。得到分析测量图形分别如图4、5、6、7所示。
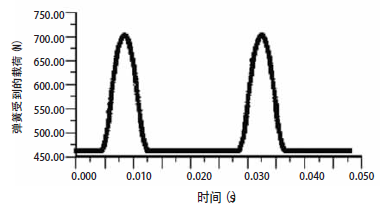
图4 弹簧受力随时间的变化
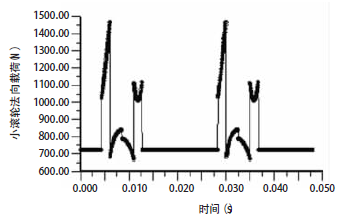
图5 小滚轮法向载荷随时间的变化
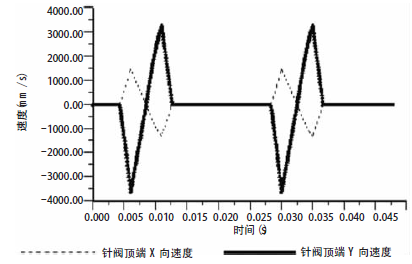
图6 针阀顶端速度随时间的变化
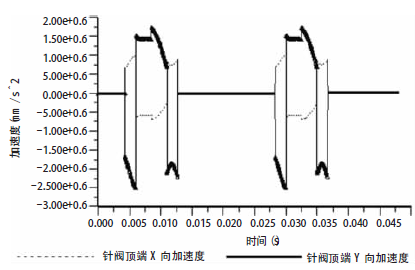
图7 针阀顶端加速度随时间的变化
三、结论
本文用Pro/E软件对凸轮阀体机构进行了三维建模与仿真分析,说明了Pro/E在机构仿真和分析中的可行性,为早期产品的结构参数修改提供了便利。