九点控制器是依据偏差和偏差变化率来调整控制器的输出,其系统组成如图1所示。
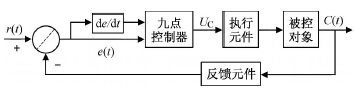
图1 九点控制器组成框图
我们首先对一些概念进行规定:系统的设定值r,输出量c,控制器的输出为Uc;偏差e=r-c,偏差变化率.e=(ei-ei-1)/T,其中T为采样周期,i及i-1分别为本次采样时刻和上次采样时刻,偏差零带为±e0,偏差变化率零带为±.e0。我们知道系统在运行时,偏差(e)和偏差变化率(.e)各自有3种可能的变化情况:e>0,e=0,e<0,.e>0,.e=0,.e<0,这样组合变化情况就有九种。我们可以用相平面图来对这9种组合状态进行描述,在e和.e组成的相平面上有4条虚线:L1,L2,L3,L4。L1和L2所夹的区域构成期望偏差变化率e的零带,L3和L4所夹的区域构成期望偏差e的零带。这4条线将整个相平面分成9个区域,这九个区域正好与系统运行的可能的9种工况相对应。对应不同的区域,要采用不同的控制策略。控制器的输出Uc=Ke,其中,K为控制器的控制参数,在不同的控制器区域K取值不同。K4+ ,K3+ ,K2+ ,K1+ ,K4- ,K3- ,K2- ,K1- ,K0分别与I,II,......,IX区控制器的参数相对应,相平面示意图如图2所示。
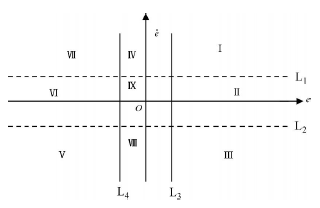
图2 控制作用相平面示意图
在工程应用中,为了直观形象的表示这种控制作用,在九个工况中,用“+”、“-”号表示控制作用力的方向,符号的个数表示控制作用的强弱程度(见表1)。
表1 控制作用的工程表示
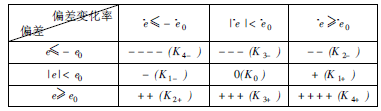
① 对于I区,e>e0,.e>.e0,uc=K4+e,表示系统的输出值小于设定值,并有继续偏小的趋势。这时控制器应给出很大的控制作用,发出强加(++++)的指令(即K4+取值很大)。
② 对于II区,e>e0,|.e|<.e0,uc=K3+e,表示系统的输出值小于设定值,没有继续变化的趋势。这时控制器应给出较大的控制作用,发出稍加(+++)的指令(即K3+取值较大)。
③ 对于III区,e>e0,.e<-.e0,uc=K2+e,表示系统的输出值小于设定值,但有向设定值靠拢的趋势。这时控制器应给出较小的控制作用,发出弱加(++)的指令(即K2+取值较小)。
④ 对于IV区,|e|(e0,.e>.e0,uc=K1+e,表示系统的输出值等于设定值,但有负向偏离设定值的趋势。这时控制器应给出很小的控制作用,发出微加(+)的指令(即K1+取值很小)。
⑤ 对于V区,e<-e0,.e<-.e0,uc=K4-e,表示系统的输出值大于设定值,并有继续偏大的趋势。这时控制器应给出很大的反向控制作用,发出强减(----)的指令(即K4-取值很大)。
⑥ 2对于VI区,e<-e0,|.e|<.e0,uc=K3-e,表示系统的输出值大于设定值,没有继续变化的趋势。这时控制器应给出较大的反向控制作用,发出稍减(---)的指令(即K3-取值较大)。
⑦ 4对于VII区,e<-e0,.e>.e0,uc=K2-e,表示系统的输出值大于设定值,但有向设定值靠拢的趋势,这时控制器应给出较小的反向控制作用,发出弱减(--)的指令(即K2-取值较小)。
⑧ 6对于VIII区,|e|<e0,.e<-.e0,uc=K1-e,表示系统的输出值等于设定值,但有正向偏离设定值的趋势。这时控制器应给出很小的反向控制作用,发出微减(-)的指令(即K1-取值很小)。
⑨ 8对于IX区,|e|<e0,|.e|<.e0,uc=K0e,表示系统的输出值等于设定值,且没有变化的趋势。这时控制器处于期望的零带,控制器应发出保持(0)的指令(即K0取值非常小)。
一、智能阀门定位器喷嘴挡板结构
图3为电磁式力矩驱动电液伺服阀的工作原理,由永久磁铁,上导磁体,下导磁体,衔铁,控制线圈等组成,两个控制线圈套在衔铁上。由于进气和排气速度差异,气动调节阀是个不对称结构。衔铁两端与上下导磁体形成4个工作气隙,弹簧管是衔铁的弹性支座,衔铁固定在弹簧管上端,可以做微小转动,当没有控制电流通过线圈时,衔铁处于平衡位置,当有控制电流通过线圈时,衔铁在电磁力的作用下发生顺时针或者逆时针转动,从而使弹簧管产生变形。控制电流越大,衔铁的转角越大,弹簧管的变形就越大,通过控制线圈的输入电流来调整挡板与喷嘴之间的距离,从而改变输出口的压力和流量。实际设计是通过单片机的两个输出口输出PWM波来正反控制线圈的电流,PWM的宽度的不同调整了线圈上的电流不同。实际设计过程中PWM全输出时数字为50000,零输出时数字为0,所以有0<=k1+<=k2+<=k3+<=k4+<=50000,0<=k1-<=k2-<=k3-<=k4-<=50000,+、-表示线圈电流正反方向。
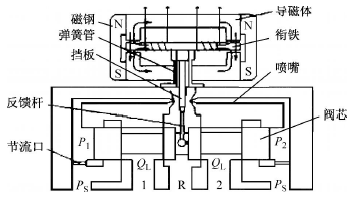
图3 电磁式力矩驱动电液伺服阀
二、控制参数的调整
由于智能阀门定位器要求的精度非常高(0.5%),而且气动阀门也不是纯的惯性特性,在实际工作过程中存在控制死区(要求0.4%),工作点漂移(1%),控制回差(1%),因此控制参数的选择尤为重要,下边用实验的办法确定控制参数。
1、参数k0的确定
k0的确定可以分为两个步骤:首先,保证k0的控制作用为零,定位器驱动线圈要求大于一定的电流(0.4mA)才能工作,所以可以对阀门进行反复的冲放气,然后逐渐减小冲放气的值,直到阀门静止的时刻记下PWM的设定值,这个值可以作为k0的初始值。根据这个初始值来逐步确定其他的参数(k1+等),待其他参数精确确定后微微调整k0,能达到满意的效果。
2、其他参数的选择
现在在k0与k4+之间等距离求k3+,k2+,k1+,同理在k0与k4-之间等距离求出k3-,k2-,k1-,作为它们初始值,然后逐步调整,达到最佳的效果(误差零带由阀门控制精度给定,误差变化率零带设定小于误差零带,随着控制精度给定的变化而变化),仿真结果如图4、图5、图6所示。
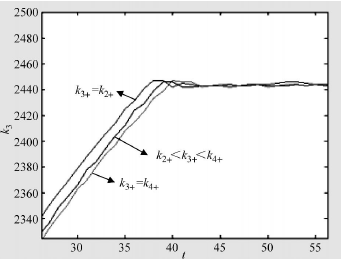
图4 k3+=k2+、k2+<k3+<k4+、k3+=k4+时输出仿真曲线(局部截图放大)
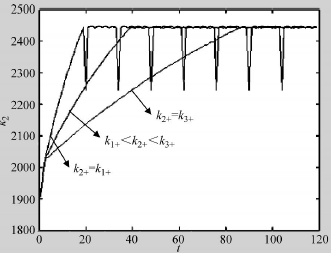
图5 k2+=k1+、k1+<k2+<k3+、k2+=k 3+ 时输出仿真曲线(局部截图放大)
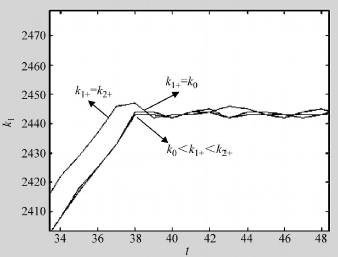
图6 k1+=k0、k0<k1+<k 2+、k1+=k2+ 时输出仿真曲线(局部截图放大)
其他参数大小的变化对控制的影响同上,由前面的研究可以得出:供能控制:K4+、K3+、K2+,负责上升和抑制负超调。耗能控制:K3-、K4-负责抑止正超调,K2-负责正超调的下降趋势控制。进气排气转换控制:K1-负责排气控制,K1+负责供气控制,而K0负责稳态平衡时的控制。控制器工程设计基础是基于运动控制的需要。从系统运动控制和工程设计角度看,最基本运动是:上升运动(由现状态达到设定值),抑制正(负)超调运动,保持稳态平衡的运动。而其他的运动是次要一些的运动,在工程设计中少考虑或不考虑。
三、结论
对于具体的智能阀门定位器的气阀而言,为了保证阀门微动,k0为50~60%的k4+ 。
由图4可知,k3+越大,启动速度越快,k3+负责启动和稳定后打压曲线回偏差带的作用,取值为90%的k4+ 。
由图5可知,k2+负责上升的时间控制,为了缩短控制时间同时防止过大的超调,取k2+为85%的k4+,过大的k2+会使系统振荡,过小又会缩短上升时间,取适中为宜。
由图6可知,K1+控制作用时间较短,但是它能够有效地缓解系统由于K2+控制作用过大而给系统带来的剧烈的振荡,取60~70%的k4+。
由于线圈电流正反效果基本一样,k3-与k3+,k2-与k2+,k1-与k1+选择的原则基本相同。
总之,九点控制器具有响应速度快、超调量小、精度高的特点,可满足较高的控制要求,但在具体控制系统应用设计中,控制参数要经过多次调整才可以使系统总体性能最优。这就要进一步研究参数与性能指标间的定量关系及其控制参数之间的配置关系。



![UZ41SM、UZ41H]柱塞闸阀](/UpLoadFile/qhvalves/Image/2010-1/2010011810423254028.jpg)


