近年来,随着自动化与电子信息技术的迅猛发展,以及现场总线和开放式总线技术的广泛应用,传统的机械式
定位器已经越来越不适应信息化时代的发展要求。而基于微处理器和先进总线技术的智能型
阀门定位器,则以其优良的在线控制功能和强大的适应性,正越来越受到广大用户的欢迎。
从上世纪80年代末开始,以Fisher、ABB、Siemens、日本山武等公司为代表相继开发了多种智能型
调节阀定位器,已广泛地应用在石油、石化、化工、电力、冶金等行业,获得了用户的广泛认可。
ZPZD3100型系列智能
阀门定位器是由隶属于中国兵器工业集团的衡阳北方光电信息技术有限公司自主开发,并拥有自主知识产权的一款新型智能阀门定位器。该产品填补了国内空白,被纳入2004年信息产业部企业技术进步和产业升级专项项目。
目前,衡阳北方光电公司已经开发出了带有位置反馈输出功能的本安、隔爆型两大产品系列,并正在开发具有液晶显示、双作用、角行程、Hart协议等功能的新产品。
一、原理与构成
1、定位器闭环控制工作原理
智能阀门定位器是现代
气动调节阀的主要附件,在工控系统中,DCS控制器、智能阀门定位器、
气动执行机构、调节阀和回路测量仪表等组成了双重闭环负反馈控制网络。其中,智能阀门定位器,由数据采集与处理电路、I/P
转换器、气动功率放大器、位置传感器等几部分组成。定位器、气动
执行机构、调节阀、位置反馈部件,组成了内层闭环负反馈控制回路[1-3],如图1所示。
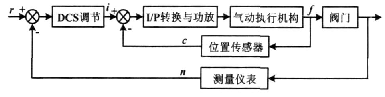
图1 阀门定位器与过程控制系统
图1中:i为来自DCS调节器的阀位控制信号;c为位置反馈信号;f为气动执行机构的输出行程。智能阀门定位器正是利用位置反馈信号,构成了一个闭环负反馈控制系统。i与c,在定位器的CPU中进行比较,根据其极性及偏差的大小,经过特定控制算法运算,控制单片机的输出信号。该信号再经过I/P部件和气体放大器,完成电气转换和功率放大,最终通过气动执行机构,实现对调节阀的精确定位控制。
2、整机组成及工作原理
智能阀门定位器结构如图2所示,其中虚线内为定位器部分,右侧为气动执行机构。控制和驱动电路,以及位置反馈传感器的数据采集电路,均位于定位器内的电路板中。控制电路主要完成控制信号和位置反馈信号的数据采集与处理工作,同时形成稳定输出电压。驱动电路用于PWM电流滤波后的功率放大。喷嘴挡板、喷嘴以及相应组件构成了I/P转换器,实现电气转换。调节喷嘴挡板和喷嘴的间距,通过气体放大器,完成对输出气体的调节。反馈杆和位置反馈传感器,完成气动执行机构位移的检测,并组成完整的闭环控制系统。
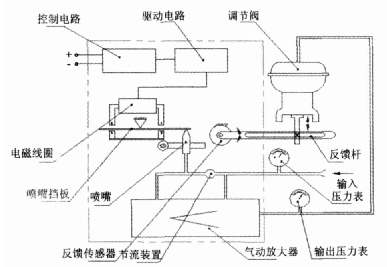
图2 智能阀门定位器结构图
3、硬件电路及其工作原理
来自控制系统的4~20mA电流信号经过瞬时脉冲保护、滤波、限压等电路,产生812V左右非稳定电压信号。该信号一部分进入电源稳压电路,经过稳压变换,实现稳定的5V输出电压;然后经过AAT3221电压稳压模块,最终获得313V的稳定工作电压,供MSP430单片机和相关外围电路使用。
同时,来自控制系统或调节仪表的4~20mA电流控制信号,经过滤波、限压、差动放大等电路处理后,送入微处理器的P611I/O口,作为MSP430的采样输入信号。经过一系列软件处理,获取系统输出的控制指令。定位器上的CPU处理器根据系统不同的控制指令,利用片上外设产生不同脉冲宽度的PWM电流信号,再经过功率放大电路,产生驱动电流,驱动电磁线圈工作。电磁线圈推动I/P部件中的喷嘴挡板,产生0~0115mm左右的微小位移。根据背压工作原理,喷嘴挡板所产生的微小位移通过喷嘴驱动气体放大器工作,产生相应的气体输出,该气体通过管线输出到气体执行机构,推动阀杆产生与控制信号相对应的位移量。
另一方面,气动执行机构的直行程或角行程的变化通过阀杆带动高灵敏度的阀位传感器旋转。该传感器输出电压的变化量,经差动运放等电路处理后,送入微处理器进行AD采样,经数据处理得到对应的阀位变量。阀位设定值与阀位变量经软件计算、比较,得到一定的差值,根据此差值的大小,实时修正阀杆的位移,完成了气动阀的闭环控制过程。
由于在控制软件中采用了优化的PID控制算法,不仅提高了控制系统的响应速度,而且减少了超调量,抑制了波动,显著地提高了定位器的定位速度和定位精度。
所用微处理器为具有超低功耗特色的MSP430F14X系列单片机,其包含有12位A/D转换、Flash、硬件乘法器、定时器、看门狗、串行通信模块、I/O端口等丰富的片上资源,该单片机不仅具有集成度高、低功耗等特点,而且可实现在线编程。同时,该单片机内置温度传感器,可方便地实现温度补偿,大大减少了外围电路,提高了工作的可靠性[6]。智能阀门定位器原理如图3所示。
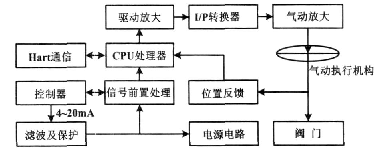
图3 智能阀门定位器原理框图
4、软件设计
充分利用MSP430单片机的超低功耗特性,在软件设计中,采用了低功耗工作模式。
A、主程序设计
主程序主要完成单片机及周围模块的初始化工作,同时开启中断,进入低功耗等待状态。在工程应用中,利用SP706R芯片设计了片外看门狗电路,通过软件实现启动与复位。主程序流程如图4所示。
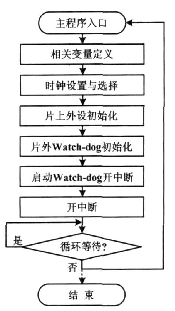
图4 主程序流程图
B、键盘中断服务程序
在本安和隔爆型系列产品的设计中,仍然采用按钮键作为人机交流的主要工具。两个按键(上键和下键),结合控制信号标志,巧妙地完成了定位器的一系列初始化设置和在线参数的整定,键盘中断流程如图5所示。
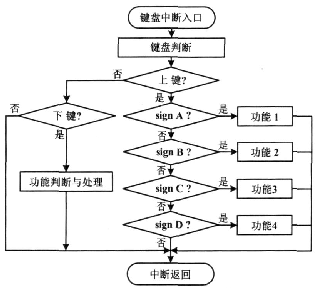
图5 键盘中断程序流程图
二、核心部件与关键技术
1、I/P转换器
I/P转换器是ZPZD3100型系列智能阀门定位器的核心部件之一,其加工制造工艺、装调测试技术比较复杂。与压电陶瓷式定位器不同,喷嘴挡板式定位器是在4~20mA控制信号电流的驱动下,靠I/P部件中喷嘴挡板的微位移,来实现对喷嘴气流的调节,控制气动放大器的输出,实现对气动执行机构的调节与控制。
由于喷嘴挡板的最大微位移只有0115mm左右,所以,对于I/P转换器中金属、塑料组件材料的选择(譬如软磁合金、无磁不锈钢、特殊塑料等)以及特殊铆接设备和铆接工艺、精密装调手段都提出了很高的要求。经过多年研究,目前已经基本掌握了此项关键技术,但是该部件一次性合格率,还有待进一步提高。
2、位置无间隙反馈感应技术
位置感应传感器是获取实时位置反馈信号的核心部件,本产品采用了进口精密级电位器。电位器输出的信号,经过放大、A/D采样,快速数据处理,最后送入比较和控制程序。由于采用了精密电位器无间隙反馈结构,也保证了阀杆正反方向运动的一致性。
目前,正在进行基于霍尔效应位置传感器的应用研究。计划在未来几年内实现智能阀门定位器位置反馈的无接触、无损耗、高精度定位。
3、低功耗技术
为了保证定位器的可靠工作,在电路设计中,大量采用低功耗元器件,包括MSP430F14x系列具有超低功耗特性的CPU芯片,片外电路和软件设计等均尽量采用超低功耗工作模式。
4、PID优化控制算法与自适应功能
为了实现气动调节阀的快速准确定位、减少超调量,控制软件中采用了PID综合控制算法,其中之一便是“积分分离”模糊控制算法。即在控制运算中实时采集、比较位置反馈与系统控制信号差值的大小。当该差值较大时取消PID运算中的积分项,以免进入积分饱和区,同时适当增大比例项的系数,加快调节速度;当该差值进入较小范围之内时,积分项重新投入运算,以消除静差。采用综合PID控制算法以后,消除了输出超调量较大、震荡、系统不稳定等不良现象。经过中石化岳阳石化公司等多家企业挂网运行,效果良好。
同时,根据工业现场阀门种类繁多的特点,编制辅助程序,实现了行程与阀位在线自动检测、气动执行机构与阀特性辨识、PID参数自动整定等“智能”功能,增强了定位器产品的自适应能力。
三、功能特点及主要参数指标
1、功能特点
ZPZD3100型智能阀门定位器与传统的阀门定位器以及国内同类产品相比较,具有以下显著优点:
①自整定性能强、参数组态简单多样、智能化程度较高;
②自适应能力强,可以与多种不同规格的阀门配套使用;
③定位准确、安装维护简单、调校方便;
④能耗小,性价比高。
相比于国内外广泛应用压电陶瓷式智能定位器,ZPZD3100型喷嘴挡板式智能阀门定位器,不仅价格低廉,更便于现场维修。同时,对仪表气的要求相对较低,对环境的适应性强,而且使用寿命更长。
总之,本产品综合了国内外同类产品的先进技术及特点,可广泛使用于化工、石油炼化、冶金、发电、轻纺、化纤等部门。
2、主要技术参数
主要技术参数如表1所示。
表1 主要技术参数
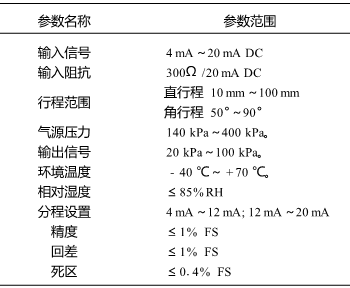
由表1可见,ZPZD3100系列智能阀门定位器的主要参数指标符合国家相关行业标准(JB/T7368-94《工业过程控制系统用阀门定位器》以及衡阳北方企业标准《Q/PJG22-2006ZPZD3100系列智能阀门定位器》),并完全满足工业调节阀定位要求。
四、结论
ZPZD3100型系列智能阀门定位器,是衡阳北方光电信息技术有限公司采用军工技术,并参照国军标的相关标准研制的一款新型智能阀门定位器。目前,该产品已经开始进入大型炼化、化工、发电等行业领域,得到了广大用户的认可和好评。在喷嘴挡板式智能阀门定位器的研发与工程应用领域,取得了国内领先优势。
参考资料
解怀人.智能型电气阀门定位器[J].化工自动化及仪表,1995,22(2):51-55.
胡大可.MSP430系列单片机C语言程序设计与开发[M].北京:北京航空航天大学出版社,2003.
胡寿松.自动控制原理[M].3版.北京:国防工业出版社,1999.
长阪文雄,本田善郎.智能式阀门定位器SVP3000Alphaplus的开发[J].世界仪表与自动化,1998,2(6):65-69.






